 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring the Dynamics of Data Transmission in 5G Networks: A Conceptual Analysis
Apr 25, 2024



This conceptual analysis examines the dynamics of data transmission in 5G networks. It addresses various aspects of sending data from cameras and LiDARs installed on a remote-controlled ferry to a land-based control center. The range of topics includes all stages of video and LiDAR data processing from acquisition and encoding to final decoding, all aspects of their transmission and reception via the WebRTC protocol, and all possible types of network problems such as handovers or congestion that could affect the quality of experience for end-users. A series of experiments were conducted to evaluate the key aspects of the data transmission. These include simulation-based reproducible runs and real-world experiments conducted using open-source solutions we developed: "Gymir5G" - an OMNeT++-based 5G simulation and "GstWebRTCApp" - a GStreamer-based application for adaptive control of media streams over the WebRTC protocol. One of the goals of this study is to formulate the bandwidth and latency requirements for reliable real-time communication and to estimate their approximate values. This goal was achieved through simulation-based experiments involving docking maneuvers in the Bay of Kiel, Germany. The final latency for the entire data processing pipeline was also estimated during the real tests. In addition, a series of simulation-based experiments showed the impact of key WebRTC features and demonstrated the effectiveness of the WebRTC protocol, while the conducted video codec comparison showed that the hardware-accelerated H.264 codec is the best. Finally, the research addresses the topic of adaptive communication, where the traditional congestion avoidance and deep reinforcement learning approaches were analyzed. The comparison in a sandbox scenario shows that the AI-based solution outperforms the WebRTC baseline GCC algorithm in terms of data rates, latency, and packet loss.
Development of a ROS-based Architecture for Intelligent Autonomous on Demand Last Mile Delivery
May 29, 2023This paper presents the development of the JKU-ITS Last Mile Delivery Robot. The proposed approach utilizes a combination of one 3D LIDAR, RGB-D camera, IMU and GPS sensor on top of a mobile robot slope mower. An embedded computer, running ROS1, is utilized to process the sensor data streams to enable 2D and 3D Simultaneous Localization and Mapping, 2D localization and object detection using a convolutional neural network.
Interaction of Autonomous and Manually-Controlled Vehicles:Implementation of a Road User Communication Service
Apr 28, 2022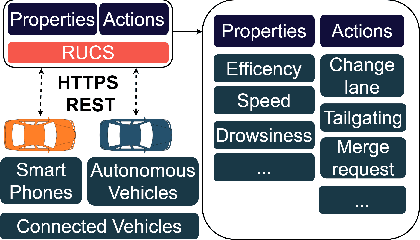
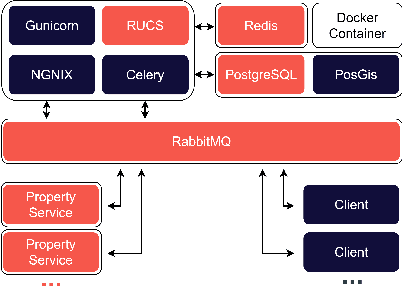
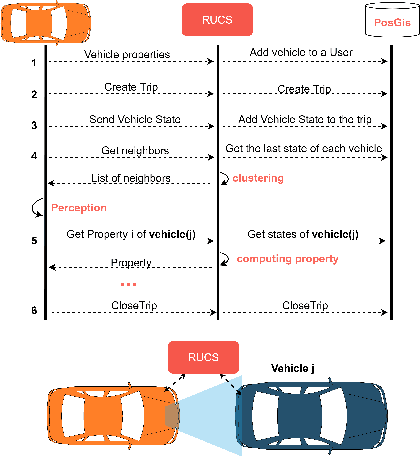
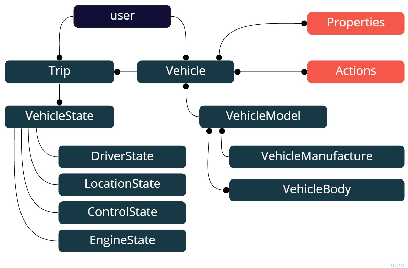
Communication between vehicles with varying degrees of automation is increasingly challenging as highly automated vehicles are unable to interpret the non-verbal signs of other road users. The lack of understanding on roads leads to lower trust in automated vehicles and impairs traffic safety. To address these problems, we propose the Road User Communication Service, a software as a service platform, which provides information exchange and cloud computing services for vehicles with varying degrees of automation. To inspect the operability of the proposed solution, field tests were carried out on a test track, where the autonomous JKU-ITS research vehicle requested the state of a driver in a manually-controlled vehicle through the implemented service. The test results validated the approach showing its feasibility to be used as a communication platform. A link to the source code is available.
Mobile Delivery Robots: Mixed Reality-Based Simulation Relying on ROS and Unity 3D
Jun 16, 2020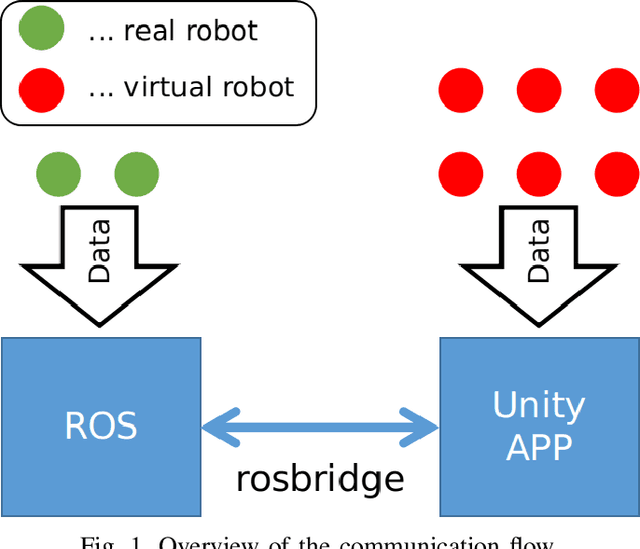
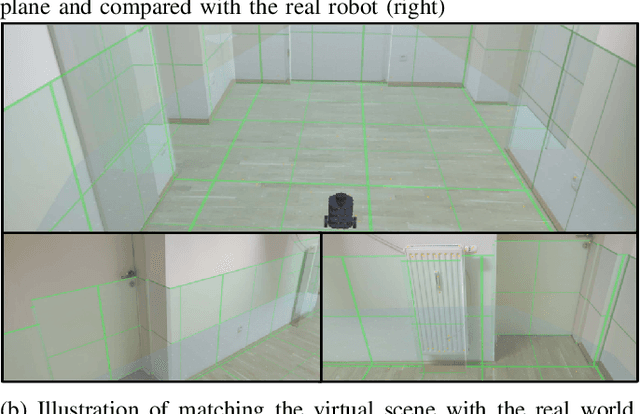
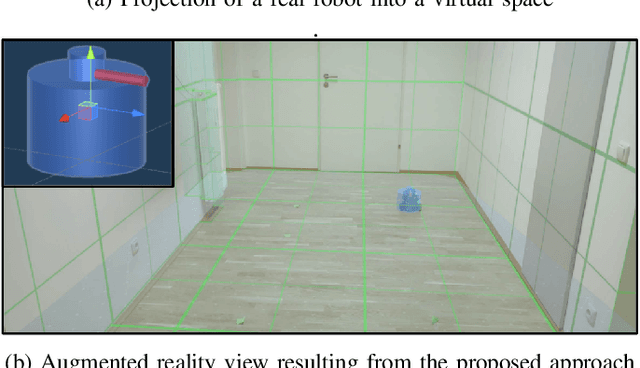

In the context of Intelligent Transportation Systems and the delivery of goods, new technology approaches need to be developed in order to cope with certain challenges that last mile delivery entails, such as navigation in an urban environment. Autonomous delivery robots can help overcome these challenges. We propose a method for performing mixed reality (MR) simulation with ROS-based robots using Unity, which synchronizes the real and virtual environment, and simultaneously uses the sensor information of the real robots to locate themselves and project them into the virtual environment, so that they can use their virtual doppelganger to perceive the virtual world. Using this method, real and virtual robots can perceive each other and the environment in which the other party is located, thereby enabling the exchange of information between virtual and real objects. Through this approach a more realistic and reliable simulation can be obtained. Results of the demonstrated use-cases verified the feasibility and efficiency as well as the stability of implementing MR using Unity for ROS-based robots.
Autonomous Driving: Framework for Pedestrian Intention Estimationin a Real World Scenario
Jun 04, 2020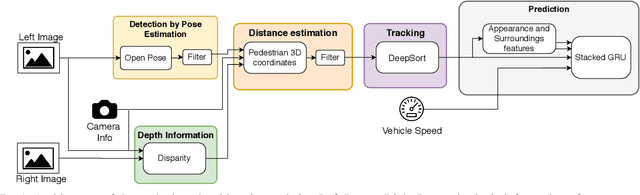
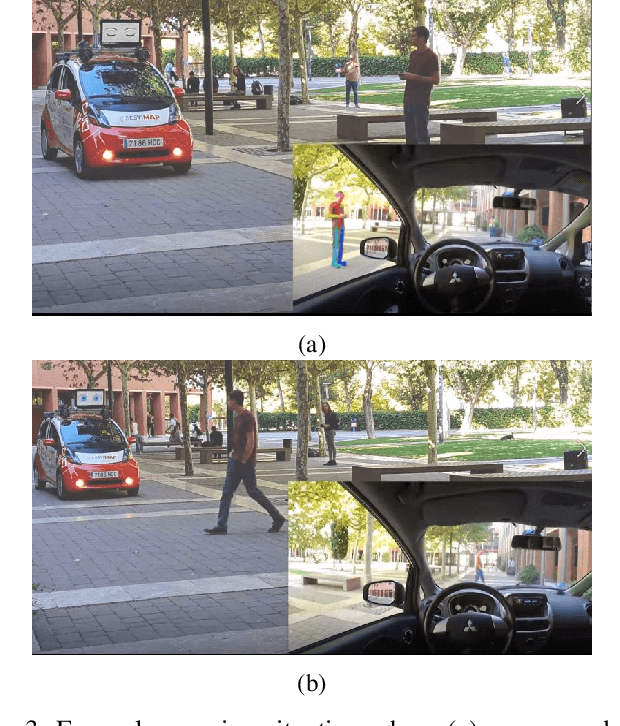
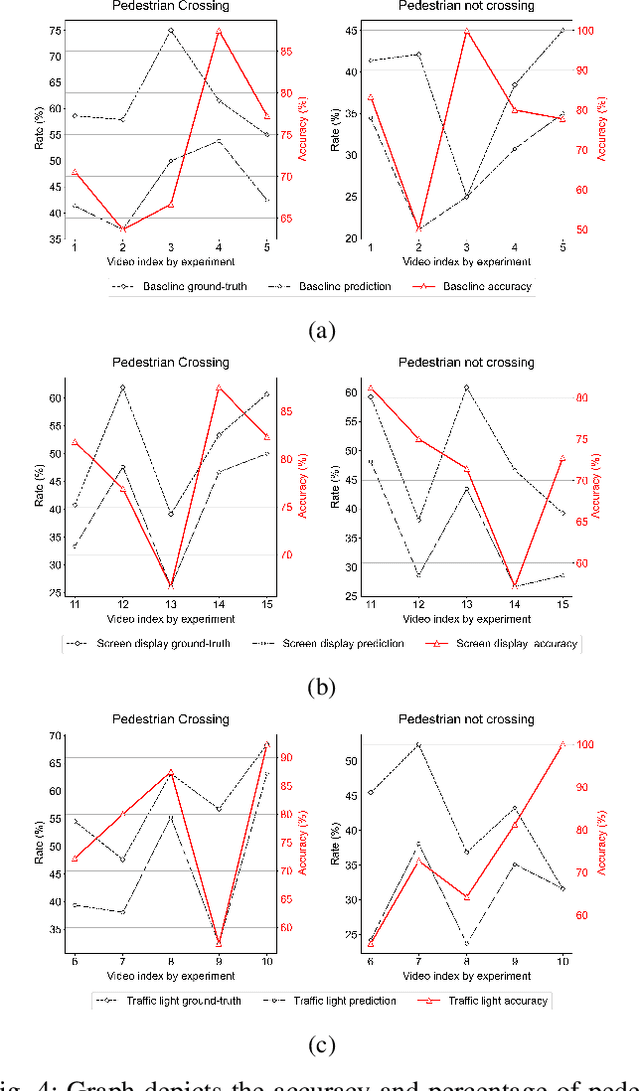
Rapid advancements in driver-assistance technology will lead to the integration of fully autonomous vehicles on our roads that will interact with other road users. To address the problem that driverless vehicles make interaction through eye contact impossible, we describe a framework for estimating the crossing intentions of pedestrians in order to reduce the uncertainty that the lack of eye contact between road users creates. The framework was deployed in a real vehicle and tested with three experimental cases that showed a variety of communication messages to pedestrians in a shared space scenario. Results from the performed field tests showed the feasibility of the presented approach.