 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated Vehicle Driver Monitoring Dataset from Real-World Scenarios
Aug 19, 2024
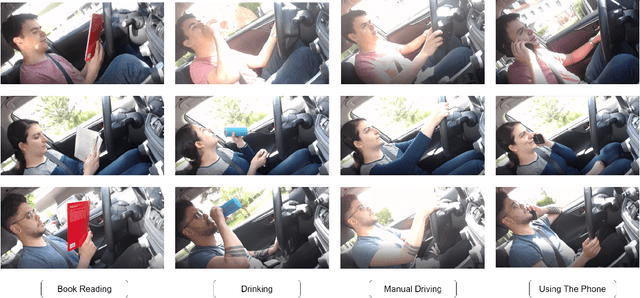
From SAE Level 3 of automation onwards, drivers are allowed to engage in activities that are not directly related to driving during their travel. However, in level 3, a misunderstanding of the capabilities of the system might lead drivers to engage in secondary tasks, which could impair their ability to react to challenging traffic situations. Anticipating driver activity allows for early detection of risky behaviors, to prevent accidents. To be able to predict the driver activity, a Deep Learning network needs to be trained on a dataset. However, the use of datasets based on simulation for training and the migration to real-world data for prediction has proven to be suboptimal. Hence, this paper presents a real-world driver activity dataset, openly accessible on IEEE Dataport, which encompasses various activities that occur in autonomous driving scenarios under various illumination and weather conditions. Results from the training process showed that the dataset provides an excellent benchmark for implementing models for driver activity recognition.
IAMCV Multi-Scenario Vehicle Interaction Dataset
Mar 13, 2024



The acquisition and analysis of high-quality sensor data constitute an essential requirement in shaping the development of fully autonomous driving systems. This process is indispensable for enhancing road safety and ensuring the effectiveness of the technological advancements in the automotive industry. This study introduces the Interaction of Autonomous and Manually-Controlled Vehicles (IAMCV) dataset, a novel and extensive dataset focused on inter-vehicle interactions. The dataset, enriched with a sophisticated array of sensors such as Light Detection and Ranging, cameras, Inertial Measurement Unit/Global Positioning System, and vehicle bus data acquisition, provides a comprehensive representation of real-world driving scenarios that include roundabouts, intersections, country roads, and highways, recorded across diverse locations in Germany. Furthermore, the study shows the versatility of the IAMCV dataset through several proof-of-concept use cases. Firstly, an unsupervised trajectory clustering algorithm illustrates the dataset's capability in categorizing vehicle movements without the need for labeled training data. Secondly, we compare an online camera calibration method with the Robot Operating System-based standard, using images captured in the dataset. Finally, a preliminary test employing the YOLOv8 object-detection model is conducted, augmented by reflections on the transferability of object detection across various LIDAR resolutions. These use cases underscore the practical utility of the collected dataset, emphasizing its potential to advance research and innovation in the area of intelligent vehicles.
On Transferability of Driver Observation Models from Simulated to Real Environments in Autonomous Cars
Jul 31, 2023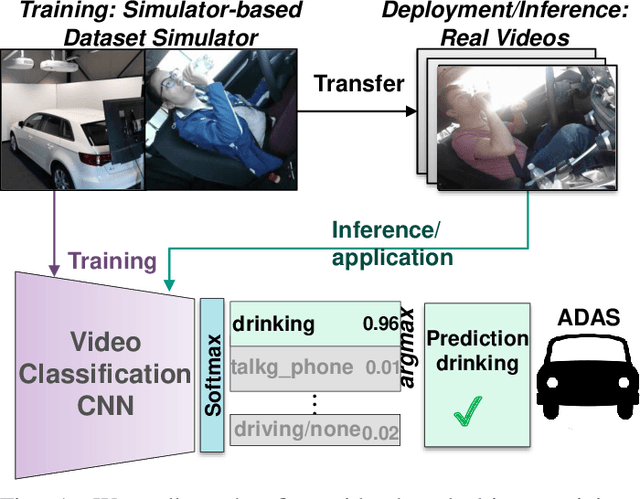
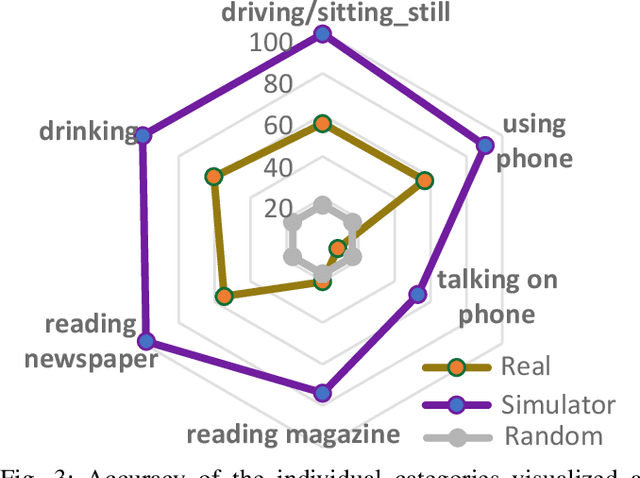
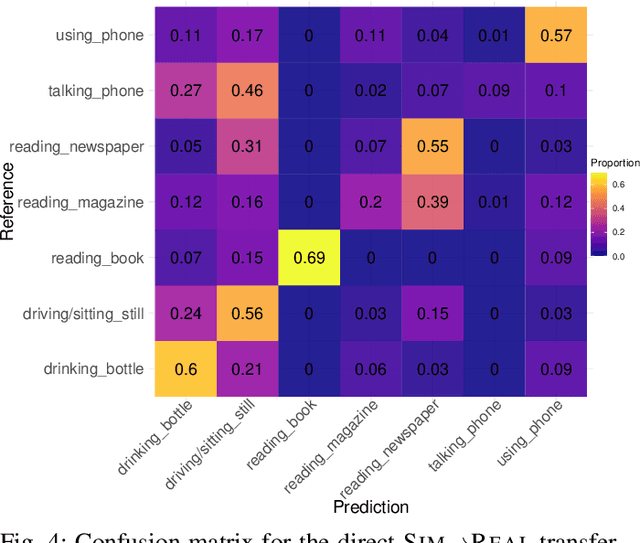

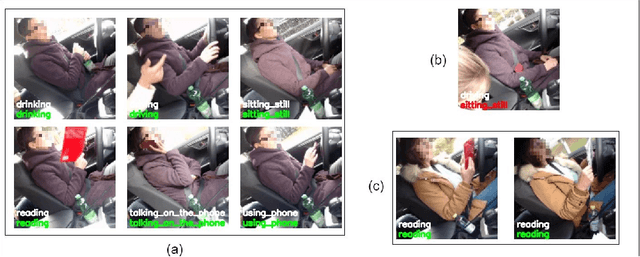
For driver observation frameworks, clean datasets collected in controlled simulated environments often serve as the initial training ground. Yet, when deployed under real driving conditions, such simulator-trained models quickly face the problem of distributional shifts brought about by changing illumination, car model, variations in subject appearances, sensor discrepancies, and other environmental alterations. This paper investigates the viability of transferring video-based driver observation models from simulation to real-world scenarios in autonomous vehicles, given the frequent use of simulation data in this domain due to safety issues. To achieve this, we record a dataset featuring actual autonomous driving conditions and involving seven participants engaged in highly distracting secondary activities. To enable direct SIM to REAL transfer, our dataset was designed in accordance with an existing large-scale simulator dataset used as the training source. We utilize the Inflated 3D ConvNet (I3D) model, a popular choice for driver observation, with Gradient-weighted Class Activation Mapping (Grad-CAM) for detailed analysis of model decision-making. Though the simulator-based model clearly surpasses the random baseline, its recognition quality diminishes, with average accuracy dropping from 85.7% to 46.6%. We also observe strong variations across different behavior classes. This underscores the challenges of model transferability, facilitating our research of more robust driver observation systems capable of dealing with real driving conditions.
Development of a ROS-based Architecture for Intelligent Autonomous on Demand Last Mile Delivery
May 29, 2023This paper presents the development of the JKU-ITS Last Mile Delivery Robot. The proposed approach utilizes a combination of one 3D LIDAR, RGB-D camera, IMU and GPS sensor on top of a mobile robot slope mower. An embedded computer, running ROS1, is utilized to process the sensor data streams to enable 2D and 3D Simultaneous Localization and Mapping, 2D localization and object detection using a convolutional neural network.
JKU-ITS Automobile for Research on Autonomous Vehicles
Jan 16, 2023

In this paper, we present our brand-new platform for Automated Driving research. The chosen vehicle is a RAV4 hybrid SUV from TOYOTA provided with exteroceptive sensors such as a multilayer LIDAR, a monocular camera, Radar and GPS; and proprioceptive sensors such as encoders and a 9-DOF IMU. These sensors are integrated in the vehicle via a main computer running ROS1 under Linux 20.04. Additionally, we installed an open-source ADAS called Comma Two, that runs Openpilot to control the vehicle. The platform is currently being used to research in the field of autonomous vehicles, human and autonomous vehicles interaction, human factors, and energy consumption.
Road Markings Segmentation from LIDAR Point Clouds using Reflectivity Information
Nov 02, 2022Lane detection algorithms are crucial for the development of autonomous vehicles technologies. The more extended approach is to use cameras as sensors. However, LIDAR sensors can cope with weather and light conditions that cameras can not. In this paper, we introduce a method to extract road markings from the reflectivity data of a 64-layers LIDAR sensor. First, a plane segmentation method along with region grow clustering was used to extract the road plane. Then we applied an adaptive thresholding based on Otsu s method and finally, we fitted line models to filter out the remaining outliers. The algorithm was tested on a test track at 60km/h and a highway at 100km/h. Results showed the algorithm was reliable and precise. There was a clear improvement when using reflectivity data in comparison to the use of the raw intensity data both of them provided by the LIDAR sensor.
Interaction of Autonomous and Manually-Controlled Vehicles:Implementation of a Road User Communication Service
Apr 28, 2022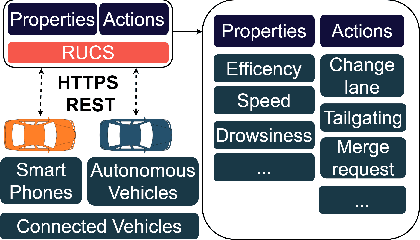
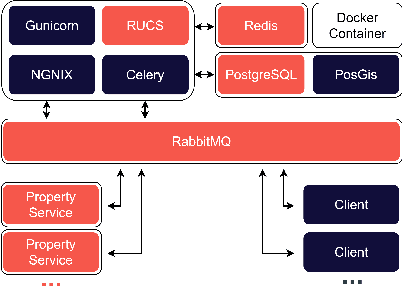
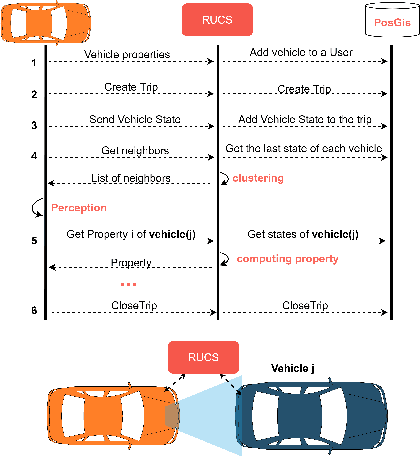
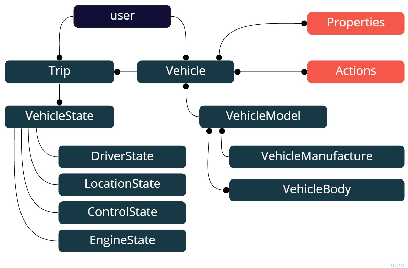
Communication between vehicles with varying degrees of automation is increasingly challenging as highly automated vehicles are unable to interpret the non-verbal signs of other road users. The lack of understanding on roads leads to lower trust in automated vehicles and impairs traffic safety. To address these problems, we propose the Road User Communication Service, a software as a service platform, which provides information exchange and cloud computing services for vehicles with varying degrees of automation. To inspect the operability of the proposed solution, field tests were carried out on a test track, where the autonomous JKU-ITS research vehicle requested the state of a driver in a manually-controlled vehicle through the implemented service. The test results validated the approach showing its feasibility to be used as a communication platform. A link to the source code is available.
Mobile Delivery Robots: Mixed Reality-Based Simulation Relying on ROS and Unity 3D
Jun 16, 2020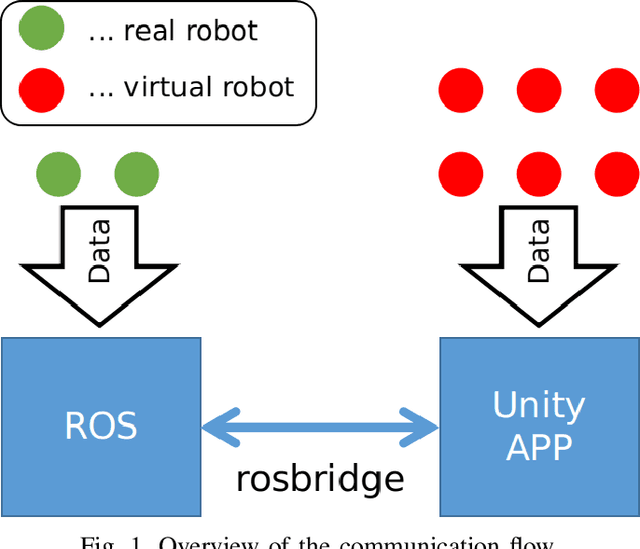
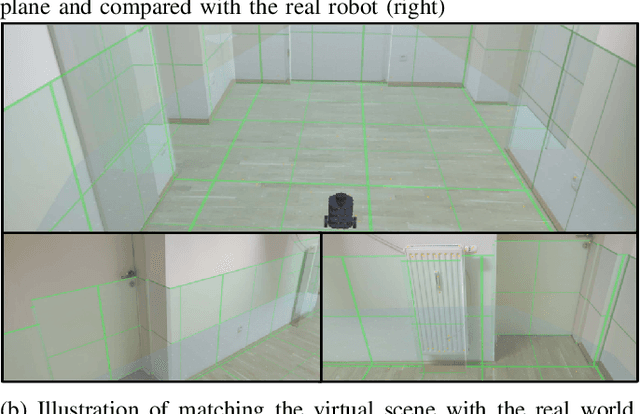
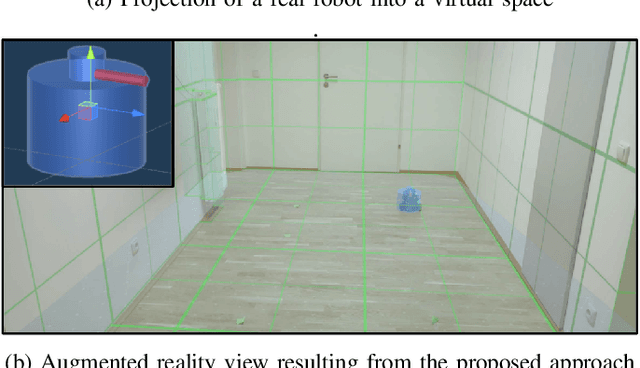

In the context of Intelligent Transportation Systems and the delivery of goods, new technology approaches need to be developed in order to cope with certain challenges that last mile delivery entails, such as navigation in an urban environment. Autonomous delivery robots can help overcome these challenges. We propose a method for performing mixed reality (MR) simulation with ROS-based robots using Unity, which synchronizes the real and virtual environment, and simultaneously uses the sensor information of the real robots to locate themselves and project them into the virtual environment, so that they can use their virtual doppelganger to perceive the virtual world. Using this method, real and virtual robots can perceive each other and the environment in which the other party is located, thereby enabling the exchange of information between virtual and real objects. Through this approach a more realistic and reliable simulation can be obtained. Results of the demonstrated use-cases verified the feasibility and efficiency as well as the stability of implementing MR using Unity for ROS-based robots.