 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIAMCV Multi-Scenario Vehicle Interaction Dataset
Mar 13, 2024



The acquisition and analysis of high-quality sensor data constitute an essential requirement in shaping the development of fully autonomous driving systems. This process is indispensable for enhancing road safety and ensuring the effectiveness of the technological advancements in the automotive industry. This study introduces the Interaction of Autonomous and Manually-Controlled Vehicles (IAMCV) dataset, a novel and extensive dataset focused on inter-vehicle interactions. The dataset, enriched with a sophisticated array of sensors such as Light Detection and Ranging, cameras, Inertial Measurement Unit/Global Positioning System, and vehicle bus data acquisition, provides a comprehensive representation of real-world driving scenarios that include roundabouts, intersections, country roads, and highways, recorded across diverse locations in Germany. Furthermore, the study shows the versatility of the IAMCV dataset through several proof-of-concept use cases. Firstly, an unsupervised trajectory clustering algorithm illustrates the dataset's capability in categorizing vehicle movements without the need for labeled training data. Secondly, we compare an online camera calibration method with the Robot Operating System-based standard, using images captured in the dataset. Finally, a preliminary test employing the YOLOv8 object-detection model is conducted, augmented by reflections on the transferability of object detection across various LIDAR resolutions. These use cases underscore the practical utility of the collected dataset, emphasizing its potential to advance research and innovation in the area of intelligent vehicles.
Extraction of Road Users' Behavior From Realistic Data According to Assumptions in Safety-Related Models for Automated Driving Systems
Jul 31, 2023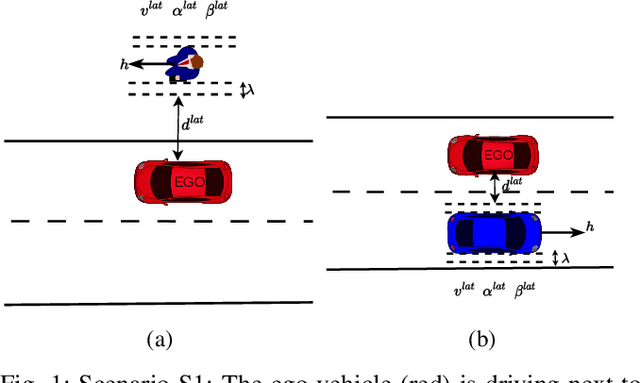
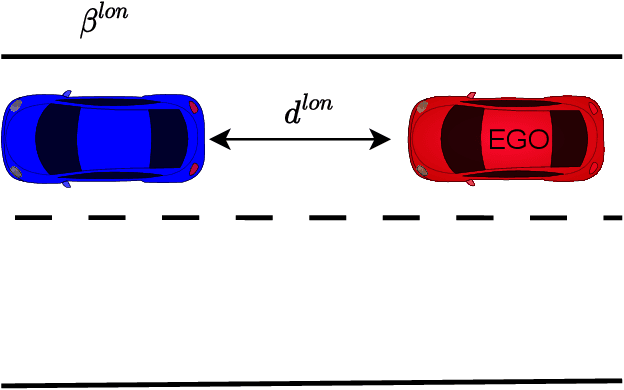
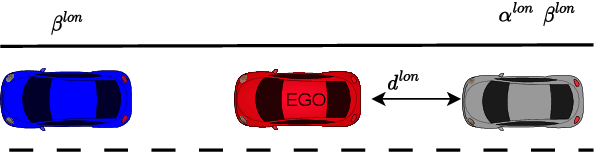
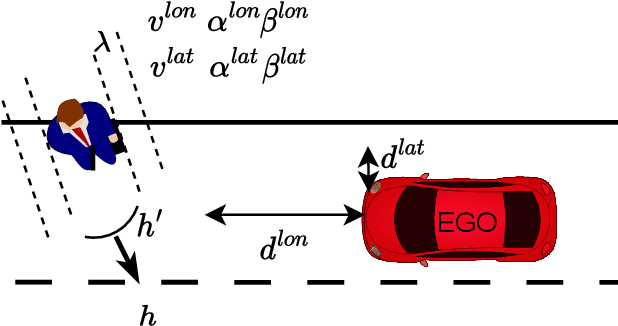
In this work, we utilized the methodology outlined in the IEEE Standard 2846-2022 for "Assumptions in Safety-Related Models for Automated Driving Systems" to extract information on the behavior of other road users in driving scenarios. This method includes defining high-level scenarios, determining kinematic characteristics, evaluating safety relevance, and making assumptions on reasonably predictable behaviors. The assumptions were expressed as kinematic bounds. The numerical values for these bounds were extracted using Python scripts to process realistic data from the UniD dataset. The resulting information enables Automated Driving Systems designers to specify the parameters and limits of a road user's state in a specific scenario. This information can be utilized to establish starting conditions for testing a vehicle that is equipped with an Automated Driving System in simulations or on actual roads.
Interaction of Autonomous and Manually-Controlled Vehicles:Implementation of a Road User Communication Service
Apr 28, 2022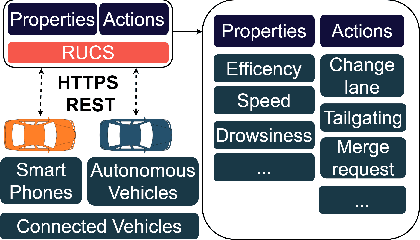
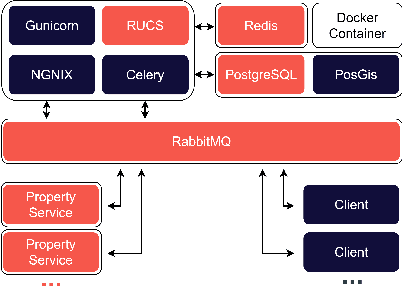
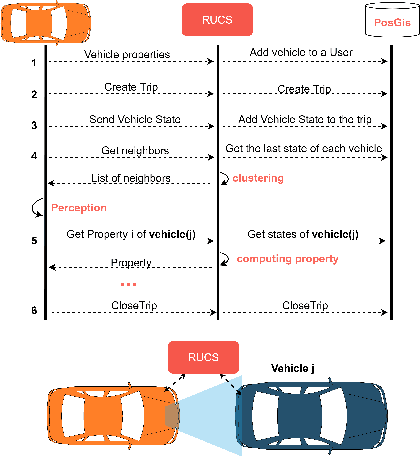
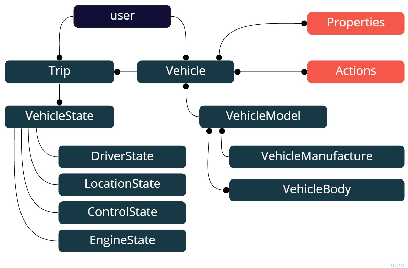
Communication between vehicles with varying degrees of automation is increasingly challenging as highly automated vehicles are unable to interpret the non-verbal signs of other road users. The lack of understanding on roads leads to lower trust in automated vehicles and impairs traffic safety. To address these problems, we propose the Road User Communication Service, a software as a service platform, which provides information exchange and cloud computing services for vehicles with varying degrees of automation. To inspect the operability of the proposed solution, field tests were carried out on a test track, where the autonomous JKU-ITS research vehicle requested the state of a driver in a manually-controlled vehicle through the implemented service. The test results validated the approach showing its feasibility to be used as a communication platform. A link to the source code is available.