 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFacial Features Integration in Last Mile Delivery Robots
Apr 15, 2024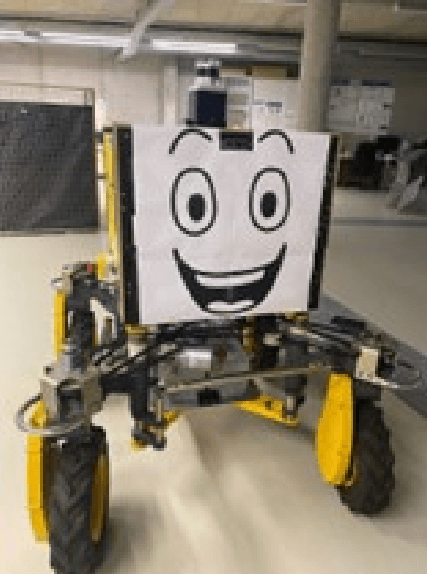
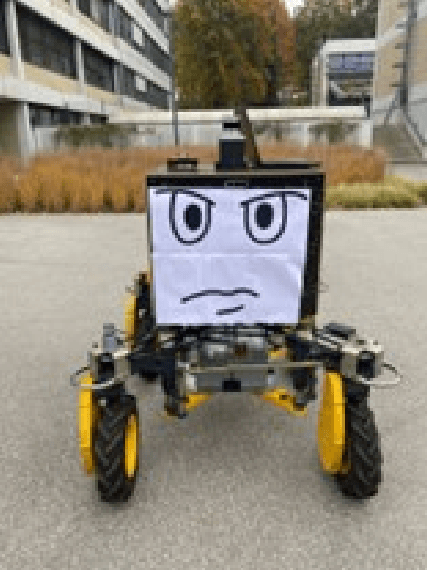
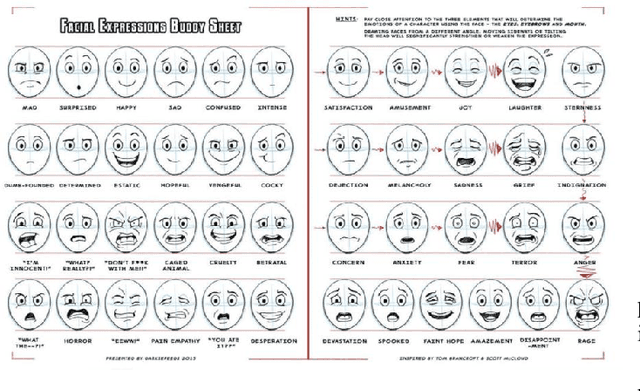
Delivery services have undergone technological advancements, with robots now directly delivering packages to recipients. While these robots are designed for efficient functionality, they have not been specifically designed for interactions with humans. Building on the premise that incorporating human-like characteristics into a robot has the potential to positively impact technology acceptance, this study explores human reactions to a robot characterized with facial expressions. The findings indicate a correlation between anthropomorphic features and the observed responses.
IAMCV Multi-Scenario Vehicle Interaction Dataset
Mar 13, 2024



The acquisition and analysis of high-quality sensor data constitute an essential requirement in shaping the development of fully autonomous driving systems. This process is indispensable for enhancing road safety and ensuring the effectiveness of the technological advancements in the automotive industry. This study introduces the Interaction of Autonomous and Manually-Controlled Vehicles (IAMCV) dataset, a novel and extensive dataset focused on inter-vehicle interactions. The dataset, enriched with a sophisticated array of sensors such as Light Detection and Ranging, cameras, Inertial Measurement Unit/Global Positioning System, and vehicle bus data acquisition, provides a comprehensive representation of real-world driving scenarios that include roundabouts, intersections, country roads, and highways, recorded across diverse locations in Germany. Furthermore, the study shows the versatility of the IAMCV dataset through several proof-of-concept use cases. Firstly, an unsupervised trajectory clustering algorithm illustrates the dataset's capability in categorizing vehicle movements without the need for labeled training data. Secondly, we compare an online camera calibration method with the Robot Operating System-based standard, using images captured in the dataset. Finally, a preliminary test employing the YOLOv8 object-detection model is conducted, augmented by reflections on the transferability of object detection across various LIDAR resolutions. These use cases underscore the practical utility of the collected dataset, emphasizing its potential to advance research and innovation in the area of intelligent vehicles.
Evaluating the acceptance of autonomous vehicles in the future
Jan 26, 2023
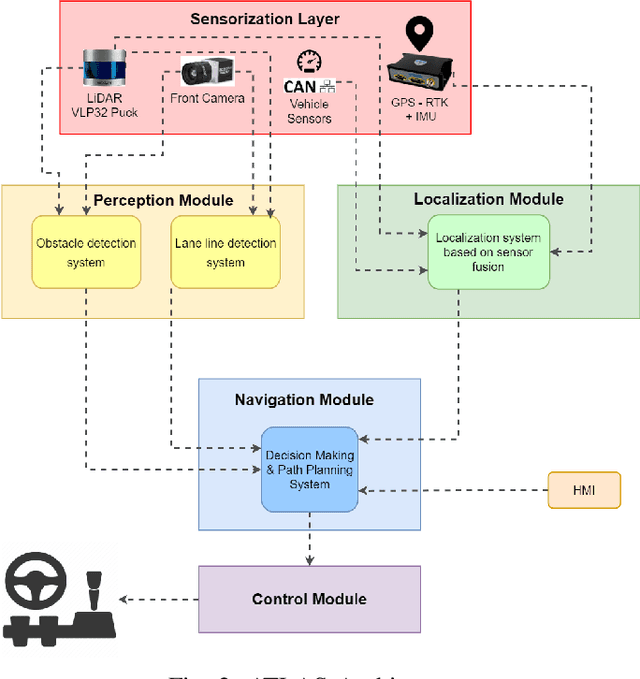
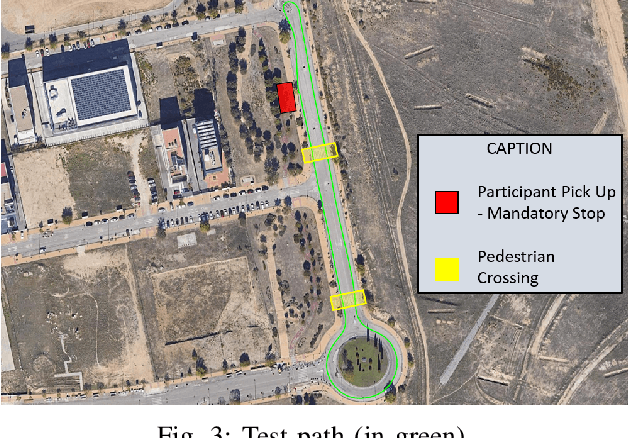
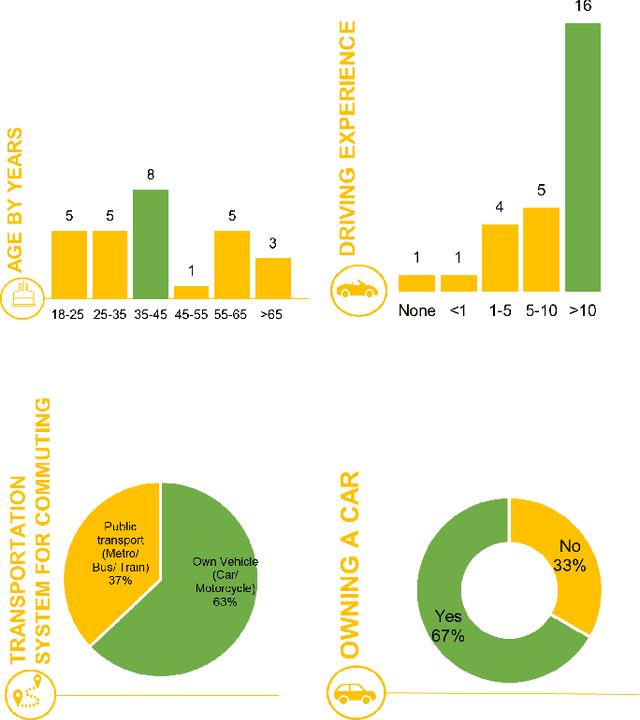
The continuous advance of the automotive industry is leading to the emergence of more advanced driver assistance systems that enable the automation of certain tasks and that are undoubtedly aimed at achieving vehicles in which the driving task can be completely delegated. All these advances will bring changes in the paradigm of the automotive market, as is the case of insurance. For this reason, CESVIMAP and the Universidad Carlos III de Madrid are working on an Autonomous Testing pLatform for insurAnce reSearch (ATLAS) to study this technology and obtain first-hand knowledge about the responsibilities of each of the agents involved in the development of the vehicles of the future. This work gathers part of the advancements made in ATLAS, which have made it possible to have an autonomous vehicle with which to perform tests in real environments and demonstrations bringing the vehicle closer to future users. As a result of this work, and in collaboration with the Johannes Kepler University Linz, the impact, degree of acceptance and confidence of users in autonomous vehicles has been studied once they have taken a trip on board a fully autonomous vehicle such as ATLAS. This study has found that, while most users would be willing to use an autonomous vehicle, the same users are concerned about the use of this type of technology. Thus, understanding the reasons for this concern can help define the future of autonomous cars.