 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClearLines - Camera Calibration from Straight Lines
May 01, 2025


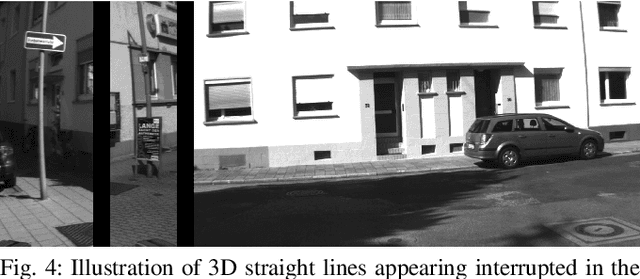
The problem of calibration from straight lines is fundamental in geometric computer vision, with well-established theoretical foundations. However, its practical applicability remains limited, particularly in real-world outdoor scenarios. These environments pose significant challenges due to diverse and cluttered scenes, interrupted reprojections of straight 3D lines, and varying lighting conditions, making the task notoriously difficult. Furthermore, the field lacks a dedicated dataset encouraging the development of respective detection algorithms. In this study, we present a small dataset named "ClearLines", and by detailing its creation process, provide practical insights that can serve as a guide for developing and refining straight 3D line detection algorithms.
Shadow Erosion and Nighttime Adaptability for Camera-Based Automated Driving Applications
Apr 11, 2025



Enhancement of images from RGB cameras is of particular interest due to its wide range of ever-increasing applications such as medical imaging, satellite imaging, automated driving, etc. In autonomous driving, various techniques are used to enhance image quality under challenging lighting conditions. These include artificial augmentation to improve visibility in poor nighttime conditions, illumination-invariant imaging to reduce the impact of lighting variations, and shadow mitigation to ensure consistent image clarity in bright daylight. This paper proposes a pipeline for Shadow Erosion and Nighttime Adaptability in images for automated driving applications while preserving color and texture details. The Shadow Erosion and Nighttime Adaptability pipeline is compared to the widely used CLAHE technique and evaluated based on illumination uniformity and visual perception quality metrics. The results also demonstrate a significant improvement over CLAHE, enhancing a YOLO-based drivable area segmentation algorithm.
Automated Vehicle Driver Monitoring Dataset from Real-World Scenarios
Aug 19, 2024
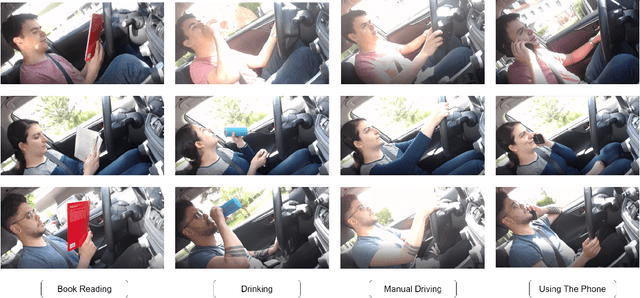
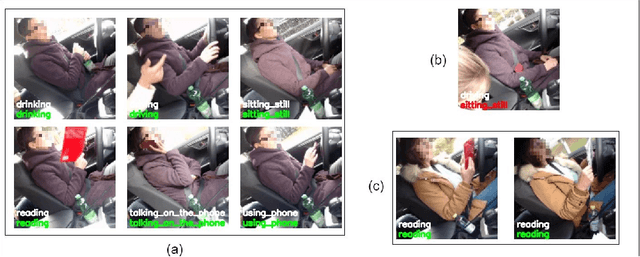
From SAE Level 3 of automation onwards, drivers are allowed to engage in activities that are not directly related to driving during their travel. However, in level 3, a misunderstanding of the capabilities of the system might lead drivers to engage in secondary tasks, which could impair their ability to react to challenging traffic situations. Anticipating driver activity allows for early detection of risky behaviors, to prevent accidents. To be able to predict the driver activity, a Deep Learning network needs to be trained on a dataset. However, the use of datasets based on simulation for training and the migration to real-world data for prediction has proven to be suboptimal. Hence, this paper presents a real-world driver activity dataset, openly accessible on IEEE Dataport, which encompasses various activities that occur in autonomous driving scenarios under various illumination and weather conditions. Results from the training process showed that the dataset provides an excellent benchmark for implementing models for driver activity recognition.