 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeViT-VS: On the Applicability of Pretrained Vision Transformer Features for Generalizable Visual Servoing
Mar 06, 2025



Visual servoing enables robots to precisely position their end-effector relative to a target object. While classical methods rely on hand-crafted features and thus are universally applicable without task-specific training, they often struggle with occlusions and environmental variations, whereas learning-based approaches improve robustness but typically require extensive training. We present a visual servoing approach that leverages pretrained vision transformers for semantic feature extraction, combining the advantages of both paradigms while also being able to generalize beyond the provided sample. Our approach achieves full convergence in unperturbed scenarios and surpasses classical image-based visual servoing by up to 31.2\% relative improvement in perturbed scenarios. Even the convergence rates of learning-based methods are matched despite requiring no task- or object-specific training. Real-world evaluations confirm robust performance in end-effector positioning, industrial box manipulation, and grasping of unseen objects using only a reference from the same category. Our code and simulation environment are available at: https://alessandroscherl.github.io/ViT-VS/
Semi-Autonomous Mobile Search and Rescue Robot for Radiation Disaster Scenarios
Jun 20, 2024This paper describes a novel semi-autonomous mobile robot system designed to assist search and rescue (SAR) first responders in disaster scenarios. While robots offer significant potential in SAR missions, current solutions are limited in their ability to handle a diverse range of tasks. This gap is addressed by presenting a system capable of (1) autonomous navigation and mapping, allowing the robot to autonomously explore and map areas affected by catastrophic events, (2) radiation mapping, enabling the system to triangulate a radiation map from discrete radiation measurements to aid in identifying hazardous areas, (3) semi-autonomous substance sampling, allowing the robot to collect samples of suspicious substances and analyze them onboard with immediate classification, and (4) valve manipulation, enabling teleoperated closing of valves that control hazardous material flow. This semi-autonomous approach balances human control over critical tasks like substance sampling with efficient robot navigation in low-risk areas. The system is evaluated during three trials that simulate possible disaster scenarios, two of which have been recorded during the European Robotics Hackathon (EnRicH). Furthermore, we provide recorded sensor data as well as the implemented software system as supplemental material through a GitHub repository: https://github.com/TW-Robotics/search-and-rescue-robot-IROS2024.
Autonomous Vehicle Calibration via Linear Optimization
Apr 27, 2022
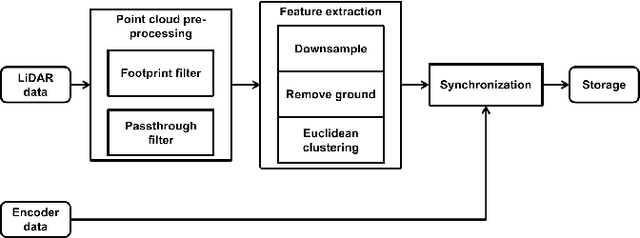
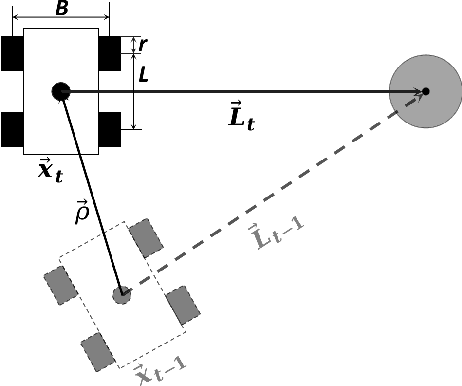
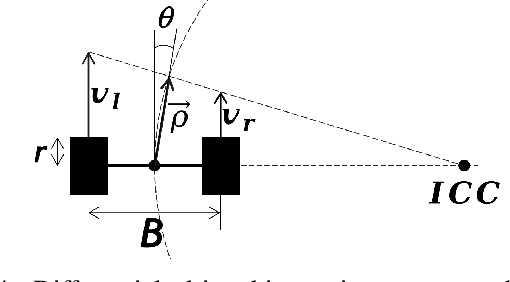
In navigation activities, kinematic parameters of a mobile vehicle play a significant role. Odometry is most commonly used for dead reckoning. However, the unrestricted accumulation of errors is a disadvantage using this method. As a result, it is necessary to calibrate odometry parameters to minimize the error accumulation. This paper presents a pipeline based on sequential least square programming to minimize the relative position displacement of an arbitrary landmark in consecutive time steps of a kinematic vehicle model by calibrating the parameters of applied model. Results showed that the developed pipeline produced accurate results with small datasets.