 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCOP: Control & Observability-aware Planning
Mar 14, 2022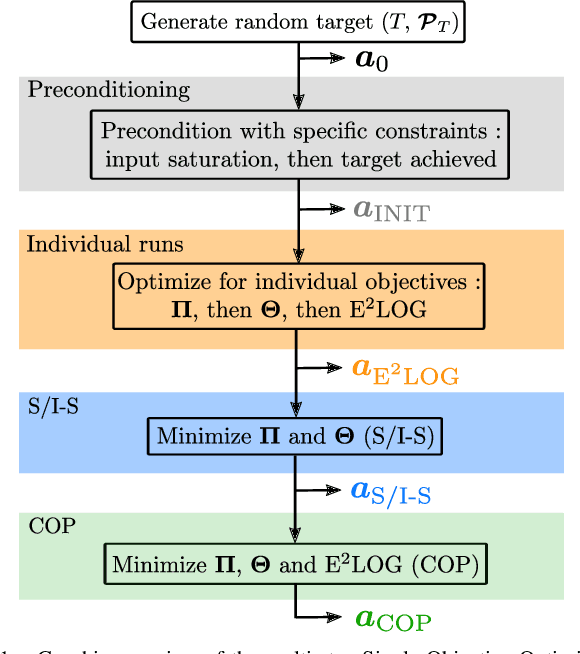
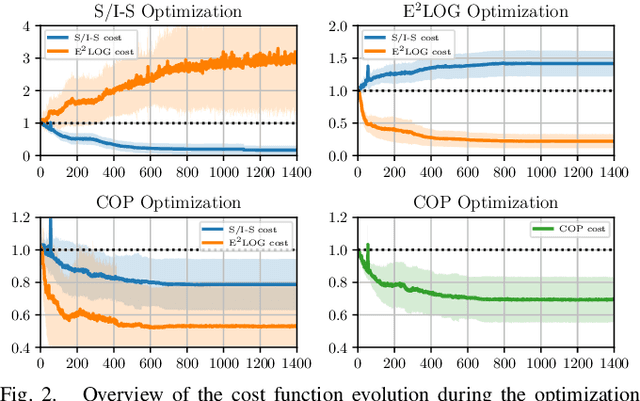
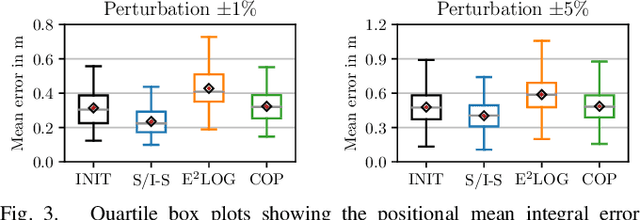
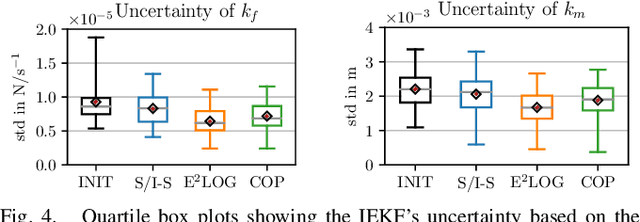
In this research, we aim to answer the question: How to combine Closed-Loop State and Input Sensitivity-based with Observability-aware trajectory planning? These possibly opposite optimization objectives can be used to improve trajectory control tracking and, at the same time, estimation performance. Our proposed novel Control & Observability-aware Planning (COP) framework is the first that uses these possibly opposing objectives in a Single-Objective Optimization Problem (SOOP) based on the Augmented Weighted Tchebycheff method to perform the balancing of them and generation of B\'ezier curve-based trajectories. Statistically relevant simulations for a 3D quadrotor unmanned aerial vehicle (UAV) case study produce results that support our claims and show the negative correlation between both objectives. We were able to reduce the positional mean integral error norm as well as the estimation uncertainty with the same trajectory to comparable levels of the trajectories optimized with individual objectives.