 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCaRoSaC: A Reinforcement Learning-Based Kinematic Control of Cable-Driven Parallel Robots by Addressing Cable Sag through Simulation
Apr 22, 2025This paper introduces the Cable Robot Simulation and Control (CaRoSaC) Framework, which integrates a simulation environment with a model-free reinforcement learning control methodology for suspended Cable-Driven Parallel Robots (CDPRs), accounting for cable sag. Our approach seeks to bridge the knowledge gap of the intricacies of CDPRs due to aspects such as cable sag and precision control necessities by establishing a simulation platform that captures the real-world behaviors of CDPRs, including the impacts of cable sag. The framework offers researchers and developers a tool to further develop estimation and control strategies within the simulation for understanding and predicting the performance nuances, especially in complex operations where cable sag can be significant. Using this simulation framework, we train a model-free control policy in Reinforcement Learning (RL). This approach is chosen for its capability to adaptively learn from the complex dynamics of CDPRs. The policy is trained to discern optimal cable control inputs, ensuring precise end-effector positioning. Unlike traditional feedback-based control methods, our RL control policy focuses on kinematic control and addresses the cable sag issues without being tethered to predefined mathematical models. We also demonstrate that our RL-based controller, coupled with the flexible cable simulation, significantly outperforms the classical kinematics approach, particularly in dynamic conditions and near the boundary regions of the workspace. The combined strength of the described simulation and control approach offers an effective solution in manipulating suspended CDPRs even at workspace boundary conditions where traditional approach fails, as proven from our experiments, ensuring that CDPRs function optimally in various applications while accounting for the often neglected but critical factor of cable sag.
Autonomous Control of Redundant Hydraulic Manipulator Using Reinforcement Learning with Action Feedback
Apr 22, 2025This article presents an entirely data-driven approach for autonomous control of redundant manipulators with hydraulic actuation. The approach only requires minimal system information, which is inherited from a simulation model. The non-linear hydraulic actuation dynamics are modeled using actuator networks from the data gathered during the manual operation of the manipulator to effectively emulate the real system in a simulation environment. A neural network control policy for autonomous control, based on end-effector (EE) position tracking is then learned using Reinforcement Learning (RL) with Ornstein-Uhlenbeck process noise (OUNoise) for efficient exploration. The RL agent also receives feedback based on supervised learning of the forward kinematics which facilitates selecting the best suitable action from exploration. The control policy directly provides the joint variables as outputs based on provided target EE position while taking into account the system dynamics. The joint variables are then mapped to the hydraulic valve commands, which are then fed to the system without further modifications. The proposed approach is implemented on a scaled hydraulic forwarder crane with three revolute and one prismatic joint to track the desired position of the EE in 3-Dimensional (3D) space. With the emulated dynamics and extensive learning in simulation, the results demonstrate the feasibility of deploying the learned controller directly on the real system.
Depth-aware Object Segmentation and Grasp Detection for Robotic Picking Tasks
Nov 22, 2021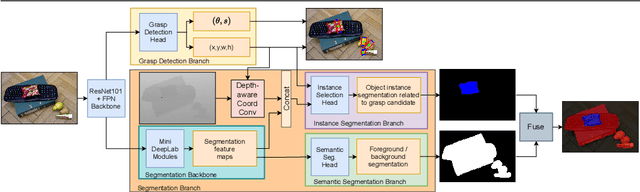

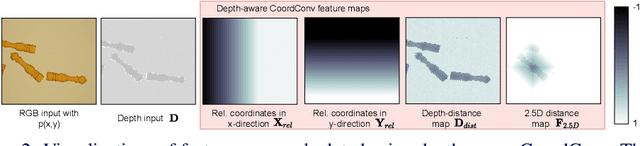
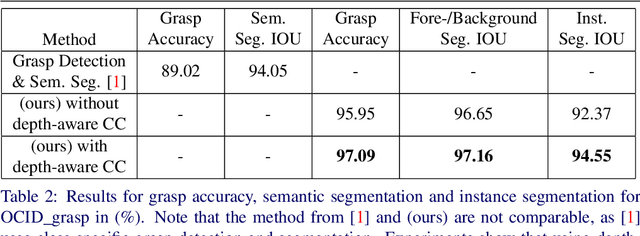
In this paper, we present a novel deep neural network architecture for joint class-agnostic object segmentation and grasp detection for robotic picking tasks using a parallel-plate gripper. We introduce depth-aware Coordinate Convolution (CoordConv), a method to increase accuracy for point proposal based object instance segmentation in complex scenes without adding any additional network parameters or computation complexity. Depth-aware CoordConv uses depth data to extract prior information about the location of an object to achieve highly accurate object instance segmentation. These resulting segmentation masks, combined with predicted grasp candidates, lead to a complete scene description for grasping using a parallel-plate gripper. We evaluate the accuracy of grasp detection and instance segmentation on challenging robotic picking datasets, namely Sil\'eane and OCID_grasp, and show the benefit of joint grasp detection and segmentation on a real-world robotic picking task.