 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling Considerations for Developing Deep Space Autonomous Spacecraft and Simulators
Jan 21, 2024


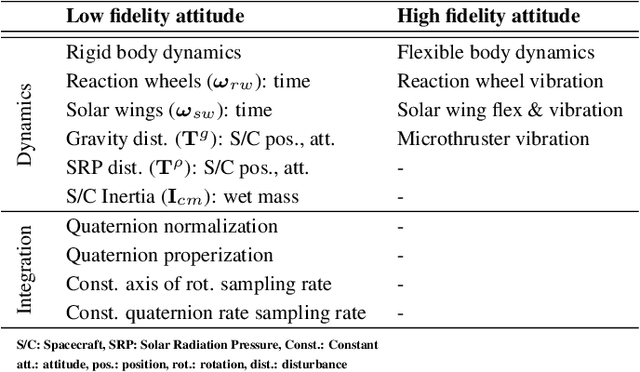
To extend the limited scope of autonomy used in prior missions for operation in distant and complex environments, there is a need to further develop and mature autonomy that jointly reasons over multiple subsystems, which we term system-level autonomy. System-level autonomy establishes situational awareness that resolves conflicting information across subsystems, which may necessitate the refinement and interconnection of the underlying spacecraft and environment onboard models. However, with a limited understanding of the assumptions and tradeoffs of modeling to arbitrary extents, designing onboard models to support system-level capabilities presents a significant challenge. In this paper, we provide a detailed analysis of the increasing levels of model fidelity for several key spacecraft subsystems, with the goal of informing future spacecraft functional- and system-level autonomy algorithms and the physics-based simulators on which they are validated. We do not argue for the adoption of a particular fidelity class of models but, instead, highlight the potential tradeoffs and opportunities associated with the use of models for onboard autonomy and in physics-based simulators at various fidelity levels. We ground our analysis in the context of deep space exploration of small bodies, an emerging frontier for autonomous spacecraft operation in space, where the choice of models employed onboard the spacecraft may determine mission success. We conduct our experiments in the Multi-Spacecraft Concept and Autonomy Tool (MuSCAT), a software suite for developing spacecraft autonomy algorithms.
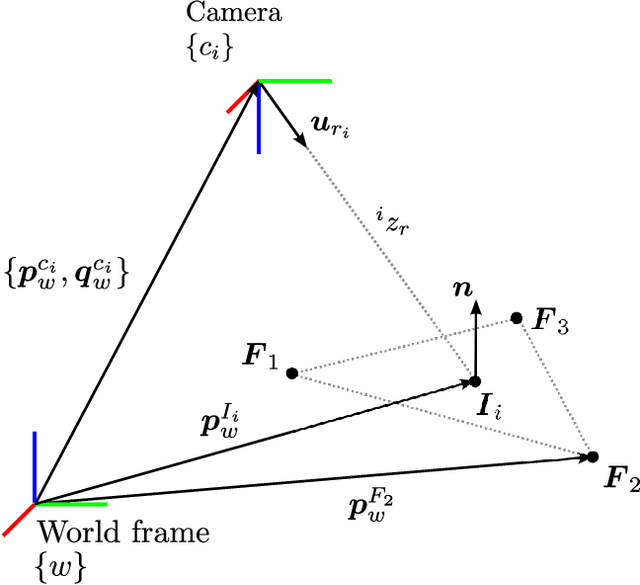
Range-Visual-Inertial Odometry: Scale Observability Without Excitation
Mar 28, 2021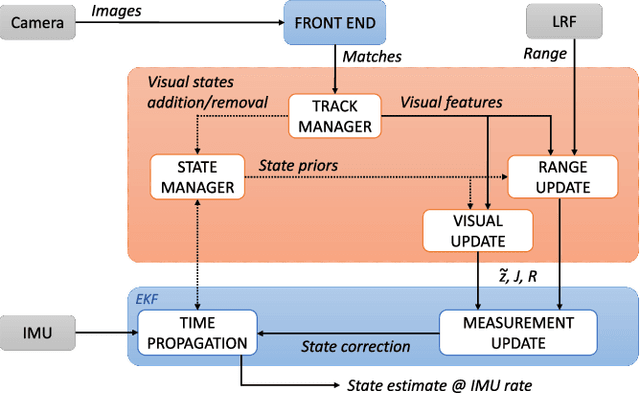
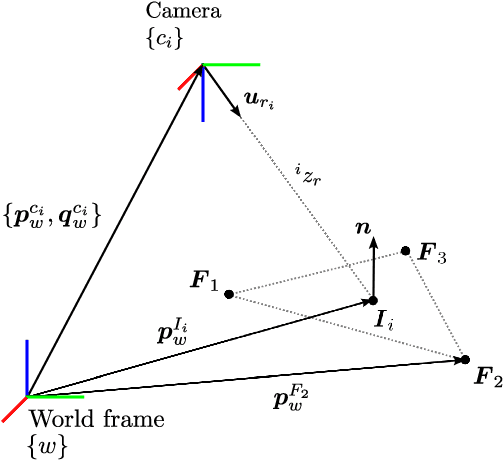


Traveling at constant velocity is the most efficient trajectory for most robotics applications. Unfortunately without accelerometer excitation, monocular Visual-Inertial Odometry (VIO) cannot observe scale and suffers severe error drift. This was the main motivation for incorporating a 1D laser range finder in the navigation system for NASA's Ingenuity Mars Helicopter. However, Ingenuity's simplified approach was limited to flat terrains. The current paper introduces a novel range measurement update model based on using facet constraints. The resulting range-VIO approach is no longer limited to flat scenes, but extends to any arbitrary structure for generic robotic applications. An important theoretical result shows that scale is no longer in the right nullspace of the observability matrix for zero or constant acceleration motion. In practical terms, this means that scale becomes observable under constant-velocity motion, which enables simple and robust autonomous operations over arbitrary terrain. Due to the small range finder footprint, range-VIO retains the minimal size, weight, and power attributes of VIO, with similar runtime. The benefits are evaluated on real flight data representative of common aerial robotics scenarios. Robustness is demonstrated using indoor stress data and fullstate ground truth. We release our software framework, called xVIO, as open source.
xVIO: A Range-Visual-Inertial Odometry Framework
Oct 13, 2020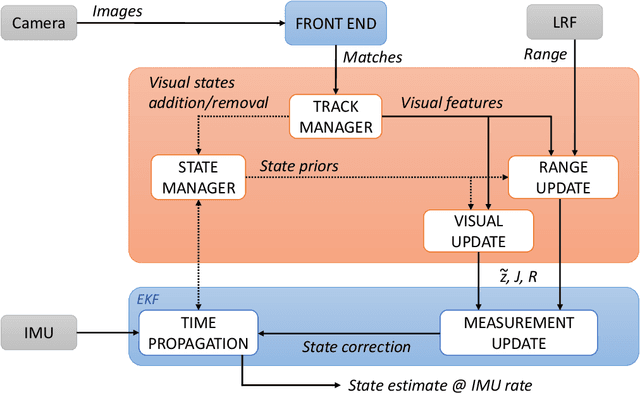
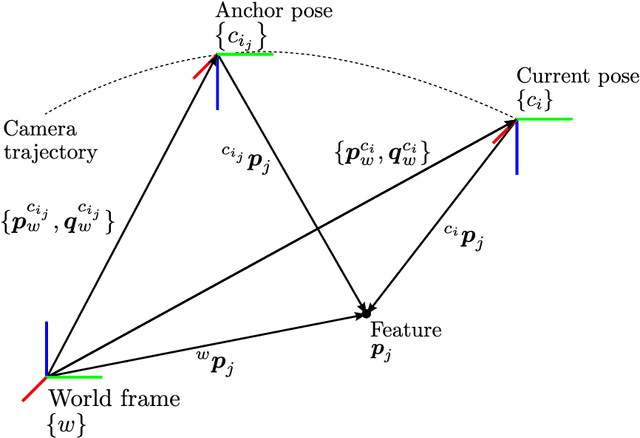
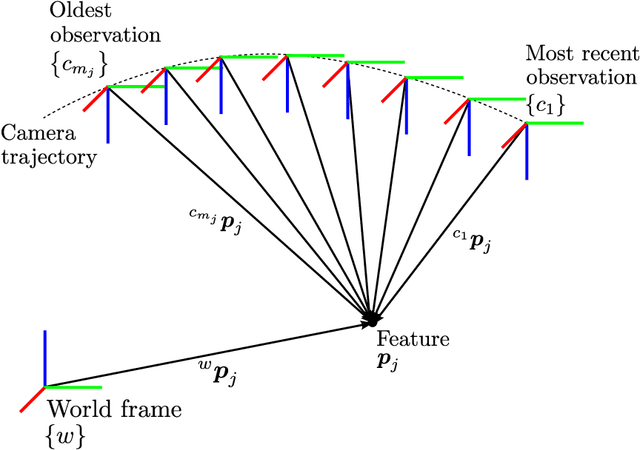
xVIO is a range-visual-inertial odometry algorithm implemented at JPL. It has been demonstrated with closed-loop controls on-board unmanned rotorcraft equipped with off-the-shelf embedded computers and sensors. It can operate at daytime with visible-spectrum cameras, or at night time using thermal infrared cameras. This report is a complete technical description of xVIO. It includes an overview of the system architecture, the implementation of the navigation filter, along with the derivations of the Jacobian matrices which are not already published in the literature.