 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic Segmentation and Depth Estimation for Real-Time Lunar Surface Mapping Using 3D Gaussian Splatting
Mar 18, 2026Navigation and mapping on the lunar surface require robust perception under challenging conditions, including poorly textured environments, high-contrast lighting, and limited computational resources. This paper presents a real-time mapping framework that integrates dense perception models with a 3D Gaussian Splatting (3DGS) representation. We first benchmark several models on synthetic datasets generated with the LuPNT simulator, selecting a stereo dense depth estimation model based on Gated Recurrent Units for its balance of speed and accuracy in depth estimation, and a convolutional neural network for its superior performance in detecting semantic segments. Using ground truth poses to decouple the local scene understanding from the global state estimation, our pipeline reconstructs a 120-meter traverse with a geometric height accuracy of approximately 3 cm, outperforming a traditional point cloud baseline without LiDAR. The resulting 3DGS map enables novel view synthesis and serves as a foundation for a full SLAM system, where its capacity for joint map and pose optimization would offer significant advantages. Our results demonstrate that combining semantic segmentation and dense depth estimation with learned map representations is an effective approach for creating detailed, large-scale maps to support future lunar surface missions.
Full Stack Navigation, Mapping, and Planning for the Lunar Autonomy Challenge
Mar 18, 2026We present a modular, full-stack autonomy system for lunar surface navigation and mapping developed for the Lunar Autonomy Challenge. Operating in a GNSS-denied, visually challenging environment, our pipeline integrates semantic segmentation, stereo visual odometry, pose graph SLAM with loop closures, and layered planning and control. We leverage lightweight learning-based perception models for real-time segmentation and feature tracking and use a factor-graph backend to maintain globally consistent localization. High-level waypoint planning is designed to promote mapping coverage while encouraging frequent loop closures, and local motion planning uses arc sampling with geometric obstacle checks for efficient, reactive control. We evaluate our approach in the competition's high-fidelity lunar simulator, demonstrating centimeter-level localization accuracy, high-fidelity map generation, and strong repeatability across random seeds and rock distributions. Our solution achieved first place in the final competition evaluation.
Visual SLAM with DEM Anchoring for Lunar Surface Navigation
Mar 18, 2026Future lunar missions will require autonomous rovers capable of traversing tens of kilometers across challenging terrain while maintaining accurate localization and producing globally consistent maps. However, the absence of global positioning systems, extreme illumination, and low-texture regolith make long-range navigation on the Moon particularly difficult, as visual-inertial odometry pipelines accumulate drift over extended traverses. To address this challenge, we present a stereo visual simultaneous localization and mapping (SLAM) system that integrates learned feature detection and matching with global constraints from digital elevation models (DEMs). Our front-end employs learning-based feature extraction and matching to achieve robustness to illumination extremes and repetitive terrain, while the back-end incorporates DEM-derived height and surface-normal factors into a pose graph, providing absolute surface constraints that mitigate long-term drift. We validate our approach using both simulated lunar traverse data generated in Unreal Engine and real Moon/Mars analog data collected from Mt. Etna. Results demonstrate that DEM anchoring consistently reduces absolute trajectory error compared to baseline SLAM methods, lowering drift in long-range navigation even in repetitive or visually aliased terrain.
Modeling Considerations for Developing Deep Space Autonomous Spacecraft and Simulators
Jan 21, 2024


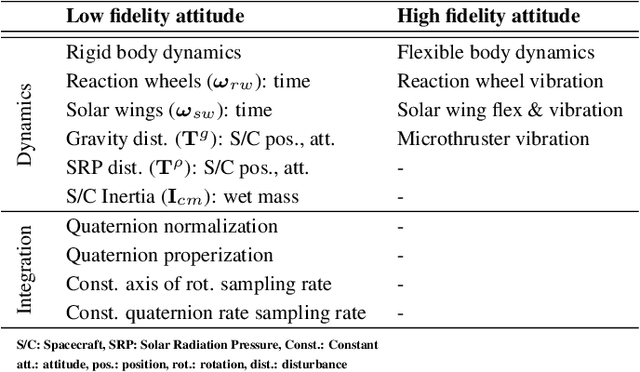
To extend the limited scope of autonomy used in prior missions for operation in distant and complex environments, there is a need to further develop and mature autonomy that jointly reasons over multiple subsystems, which we term system-level autonomy. System-level autonomy establishes situational awareness that resolves conflicting information across subsystems, which may necessitate the refinement and interconnection of the underlying spacecraft and environment onboard models. However, with a limited understanding of the assumptions and tradeoffs of modeling to arbitrary extents, designing onboard models to support system-level capabilities presents a significant challenge. In this paper, we provide a detailed analysis of the increasing levels of model fidelity for several key spacecraft subsystems, with the goal of informing future spacecraft functional- and system-level autonomy algorithms and the physics-based simulators on which they are validated. We do not argue for the adoption of a particular fidelity class of models but, instead, highlight the potential tradeoffs and opportunities associated with the use of models for onboard autonomy and in physics-based simulators at various fidelity levels. We ground our analysis in the context of deep space exploration of small bodies, an emerging frontier for autonomous spacecraft operation in space, where the choice of models employed onboard the spacecraft may determine mission success. We conduct our experiments in the Multi-Spacecraft Concept and Autonomy Tool (MuSCAT), a software suite for developing spacecraft autonomy algorithms.