 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysics-Informed Machine Learning Towards A Real-Time Spacecraft Thermal Simulator
Jul 08, 2024



Modeling thermal states for complex space missions, such as the surface exploration of airless bodies, requires high computation, whether used in ground-based analysis for spacecraft design or during onboard reasoning for autonomous operations. For example, a finite-element thermal model with hundreds of elements can take significant time to simulate, which makes it unsuitable for onboard reasoning during time-sensitive scenarios such as descent and landing, proximity operations, or in-space assembly. Further, the lack of fast and accurate thermal modeling drives thermal designs to be more conservative and leads to spacecraft with larger mass and higher power budgets. The emerging paradigm of physics-informed machine learning (PIML) presents a class of hybrid modeling architectures that address this challenge by combining simplified physics models with machine learning (ML) models resulting in models which maintain both interpretability and robustness. Such techniques enable designs with reduced mass and power through onboard thermal-state estimation and control and may lead to improved onboard handling of off-nominal states, including unplanned down-time. The PIML model or hybrid model presented here consists of a neural network which predicts reduced nodalizations (distribution and size of coarse mesh) given on-orbit thermal load conditions, and subsequently a (relatively coarse) finite-difference model operates on this mesh to predict thermal states. We compare the computational performance and accuracy of the hybrid model to a data-driven neural net model, and a high-fidelity finite-difference model of a prototype Earth-orbiting small spacecraft. The PIML based active nodalization approach provides significantly better generalization than the neural net model and coarse mesh model, while reducing computing cost by up to 1.7x compared to the high-fidelity model.
Modeling Considerations for Developing Deep Space Autonomous Spacecraft and Simulators
Jan 21, 2024


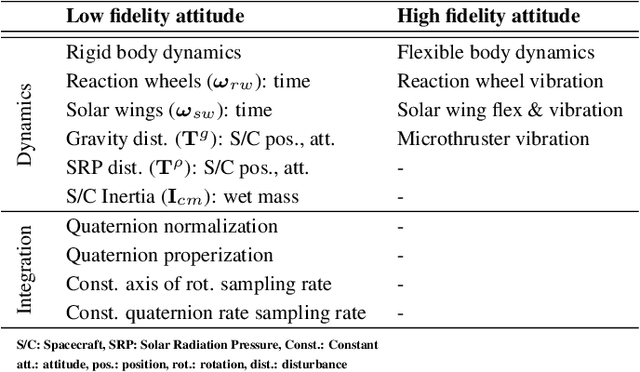
To extend the limited scope of autonomy used in prior missions for operation in distant and complex environments, there is a need to further develop and mature autonomy that jointly reasons over multiple subsystems, which we term system-level autonomy. System-level autonomy establishes situational awareness that resolves conflicting information across subsystems, which may necessitate the refinement and interconnection of the underlying spacecraft and environment onboard models. However, with a limited understanding of the assumptions and tradeoffs of modeling to arbitrary extents, designing onboard models to support system-level capabilities presents a significant challenge. In this paper, we provide a detailed analysis of the increasing levels of model fidelity for several key spacecraft subsystems, with the goal of informing future spacecraft functional- and system-level autonomy algorithms and the physics-based simulators on which they are validated. We do not argue for the adoption of a particular fidelity class of models but, instead, highlight the potential tradeoffs and opportunities associated with the use of models for onboard autonomy and in physics-based simulators at various fidelity levels. We ground our analysis in the context of deep space exploration of small bodies, an emerging frontier for autonomous spacecraft operation in space, where the choice of models employed onboard the spacecraft may determine mission success. We conduct our experiments in the Multi-Spacecraft Concept and Autonomy Tool (MuSCAT), a software suite for developing spacecraft autonomy algorithms.
Multi-Agent Algorithms for Collective Behavior: A structural and application-focused atlas
Mar 20, 2021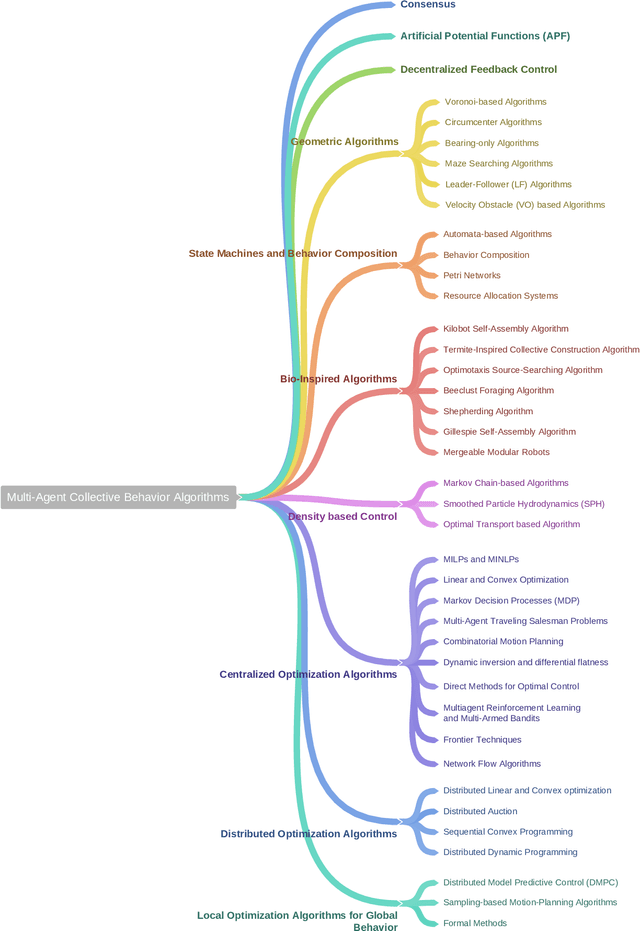
The goal of this paper is to provide a survey and application-focused atlas of collective behavior coordination algorithms for multi-agent systems. We survey the general family of collective behavior algorithms for multi-agent systems and classify them according to their underlying mathematical structure. In doing so, we aim to capture fundamental mathematical properties of algorithms (e.g., scalability with respect to the number of agents and bandwidth use) and to show how the same algorithm or family of algorithms can be used for multiple tasks and applications. Collectively, this paper provides an application-focused atlas of algorithms for collective behavior of multi-agent systems, with three objectives: 1. to act as a tutorial guide to practitioners in the selection of coordination algorithms for a given application; 2. to highlight how mathematically similar algorithms can be used for a variety of tasks, ranging from low-level control to high-level coordination; 3. to explore the state-of-the-art in the field of control of multi-agent systems and identify areas for future research.
Fast Near-Optimal Heterogeneous Task Allocation via Flow Decomposition
Nov 06, 2020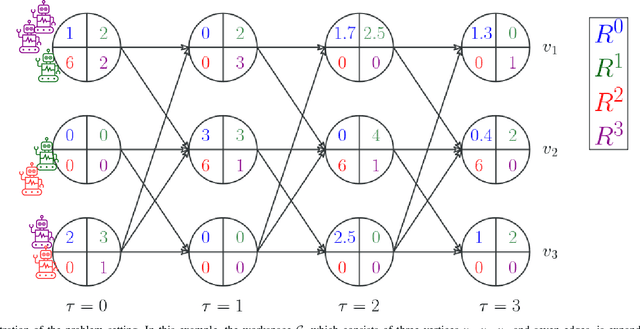
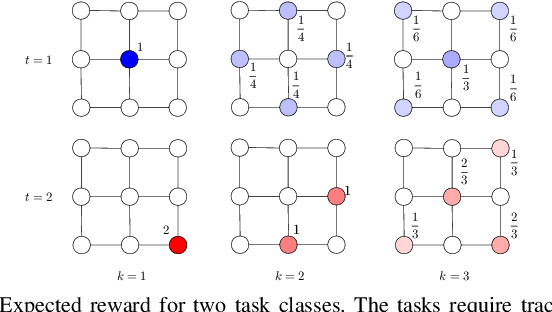
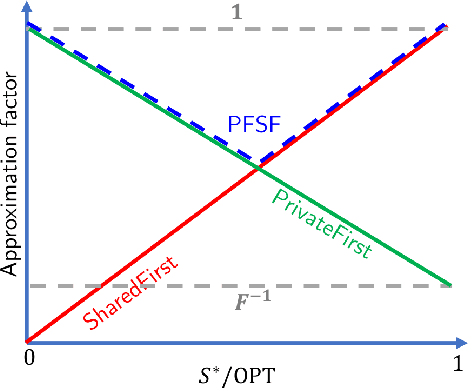
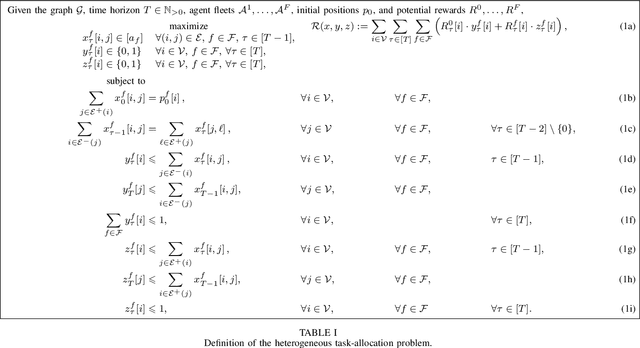
Multi-robot systems are uniquely well-suited to performing complex tasks such as patrolling and tracking, information gathering, and pick-up and delivery problems, offering significantly higher performance than single-robot systems. A fundamental building block in most multi-robot systems is task allocation: assigning robots to tasks (e.g., patrolling an area, or servicing a transportation request) as they appear based on the robots' states to maximize reward. In many practical situations, the allocation must account for heterogeneous capabilities (e.g., availability of appropriate sensors or actuators) to ensure the feasibility of execution, and to promote a higher reward, over a long time horizon. To this end, we present the FlowDec algorithm for efficient heterogeneous task-allocation achieving an approximation factor of at least 1/2 of the optimal reward. Our approach decomposes the heterogeneous problem into several homogeneous subproblems that can be solved efficiently using min-cost flow. Through simulation experiments, we show that our algorithm is faster by several orders of magnitude than a MILP approach.
Review of Multi-Agent Algorithms for Collective Behavior: a Structural Taxonomy
Mar 14, 2018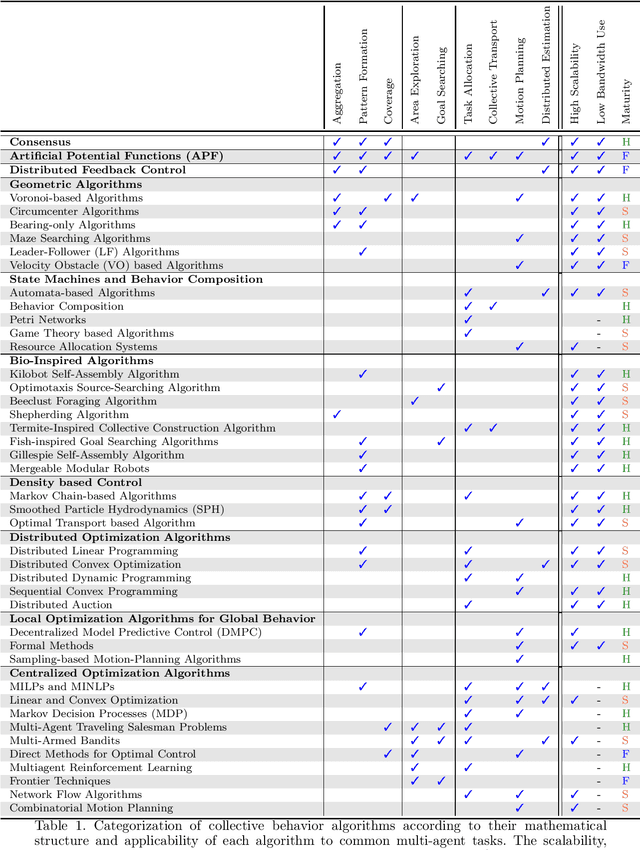
In this paper, we review multi-agent collective behavior algorithms in the literature and classify them according to their underlying mathematical structure. For each mathematical technique, we identify the multi-agent coordination tasks it can be applied to, and we analyze its scalability, bandwidth use, and demonstrated maturity. We highlight how versatile techniques such as artificial potential functions can be used for applications ranging from low-level position control to high-level coordination and task allocation, we discuss possible reasons for the slow adoption of complex distributed coordination algorithms in the field, and we highlight areas for further research and development.