 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptiGrasp: Optimized Grasp Pose Detection Using RGB Images for Warehouse Picking Robots
Sep 29, 2024



In warehouse environments, robots require robust picking capabilities to manage a wide variety of objects. Effective deployment demands minimal hardware, strong generalization to new products, and resilience in diverse settings. Current methods often rely on depth sensors for structural information, which suffer from high costs, complex setups, and technical limitations. Inspired by recent advancements in computer vision, we propose an innovative approach that leverages foundation models to enhance suction grasping using only RGB images. Trained solely on a synthetic dataset, our method generalizes its grasp prediction capabilities to real-world robots and a diverse range of novel objects not included in the training set. Our network achieves an 82.3\% success rate in real-world applications. The project website with code and data will be available at http://optigrasp.github.io.
NeBula: Quest for Robotic Autonomy in Challenging Environments; TEAM CoSTAR at the DARPA Subterranean Challenge
Mar 28, 2021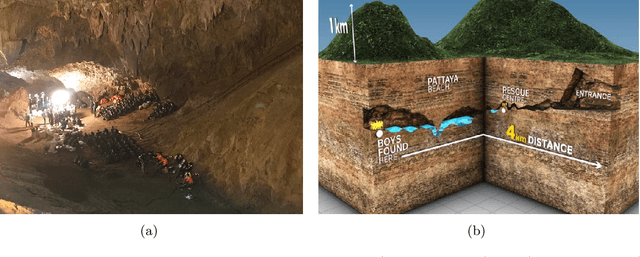
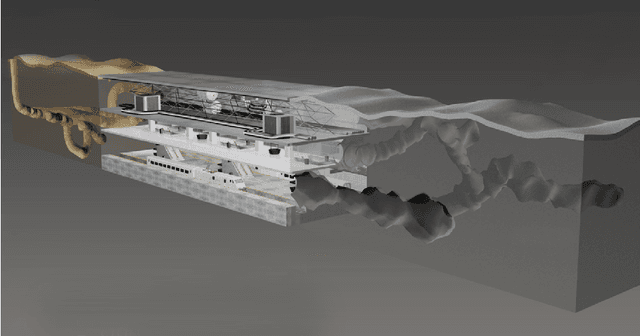
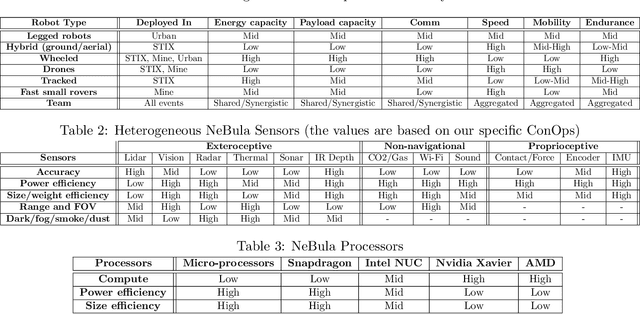
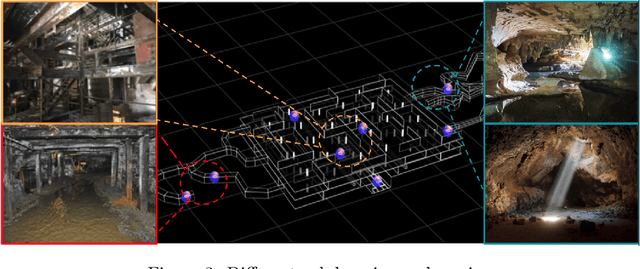
This paper presents and discusses algorithms, hardware, and software architecture developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), competing in the DARPA Subterranean Challenge. Specifically, it presents the techniques utilized within the Tunnel (2019) and Urban (2020) competitions, where CoSTAR achieved 2nd and 1st place, respectively. We also discuss CoSTAR's demonstrations in Martian-analog surface and subsurface (lava tubes) exploration. The paper introduces our autonomy solution, referred to as NeBula (Networked Belief-aware Perceptual Autonomy). NeBula is an uncertainty-aware framework that aims at enabling resilient and modular autonomy solutions by performing reasoning and decision making in the belief space (space of probability distributions over the robot and world states). We discuss various components of the NeBula framework, including: (i) geometric and semantic environment mapping; (ii) a multi-modal positioning system; (iii) traversability analysis and local planning; (iv) global motion planning and exploration behavior; (i) risk-aware mission planning; (vi) networking and decentralized reasoning; and (vii) learning-enabled adaptation. We discuss the performance of NeBula on several robot types (e.g. wheeled, legged, flying), in various environments. We discuss the specific results and lessons learned from fielding this solution in the challenging courses of the DARPA Subterranean Challenge competition.
Review of Multi-Agent Algorithms for Collective Behavior: a Structural Taxonomy
Mar 14, 2018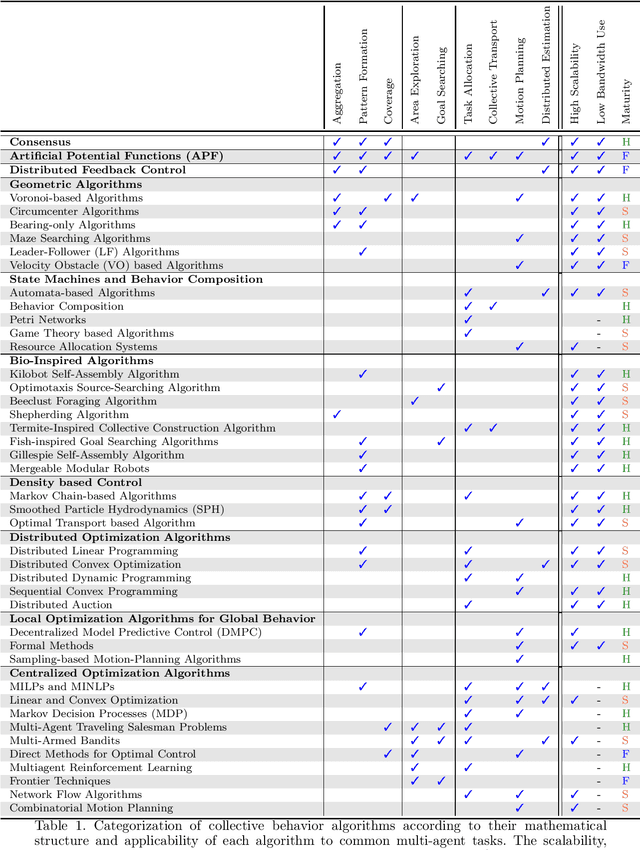
In this paper, we review multi-agent collective behavior algorithms in the literature and classify them according to their underlying mathematical structure. For each mathematical technique, we identify the multi-agent coordination tasks it can be applied to, and we analyze its scalability, bandwidth use, and demonstrated maturity. We highlight how versatile techniques such as artificial potential functions can be used for applications ranging from low-level position control to high-level coordination and task allocation, we discuss possible reasons for the slow adoption of complex distributed coordination algorithms in the field, and we highlight areas for further research and development.