 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBringing Network Coding into Multi-Robot Systems: Interplay Study for Autonomous Systems over Wireless Communications
Mar 18, 2026Communication is a core enabler for multi-robot systems (MRS), providing the mechanism through which robots exchange state information, coordinate actions, and satisfy safety constraints. While many MRS autonomy algorithms assume reliable and timely message delivery, realistic wireless channels introduce delay, erasures, and ordering stalls that can degrade performance and compromise safety-critical decisions of the robot task. In this paper, we investigate how transport-layer reliability mechanisms that mitigate communication losses and delays shape the autonomy-communication loop. We show that conventional non-coded retransmission-based protocols introduce long delays that are misaligned with the timeliness requirements of MRS applications, and may render the received data irrelevant. As an alternative, we advocate for adaptive and causal network coding, which proactively injects coded redundancy to achieve the desired delay and throughput that enable relevant data delivery to the robotic task. Specifically, this method adapts to channel conditions between robots and causally tunes the communication rates via efficient algorithms. We present two case studies: cooperative localization under delayed and lossy inter-robot communication, and a safety-critical overtaking maneuver where timely vehicle-to-vehicle message availability determines whether an ego vehicle can abort to avoid a crash. Our results demonstrate that coding-based communication significantly reduces in-order delivery stalls, preserves estimation consistency under delay, and improves deadline reliability relative to retransmission-based transport. Overall, the study highlights the need to jointly design autonomy algorithms and communication mechanisms, and positions network coding as a principled tool for dependable multi-robot operation over wireless networks.
Scalable Inspection Planning via Flow-based Mixed Integer Linear Programming
Mar 17, 2026Inspection planning is concerned with computing the shortest robot path to inspect a given set of points of interest (POIs) using the robot's sensors. This problem arises in a wide range of applications from manufacturing to medical robotics. To alleviate the problem's complexity, recent methods rely on sampling-based methods to obtain a more manageable (discrete) graph inspection planning (GIP) problem. Unfortunately, GIP still remains highly difficult to solve at scale as it requires simultaneously satisfying POI-coverage and path-connectivity constraints, giving rise to a challenging optimization problem, particularly at scales encountered in real-world scenarios. In this work, we present highly scalable Mixed Integer Linear Programming (MILP) solutions for GIP that significantly advance the state-of-the-art in both runtime and solution quality. Our key insight is a reformulation of the problem's core constraints as a network flow, which enables effective MILP models and a specialized Branch-and-Cut solver that exploits the combinatorial structure of flows. We evaluate our approach on medical and infrastructure benchmarks alongside large-scale synthetic instances. Across all scenarios, our method produces substantially tighter lower bounds than existing formulations, reducing optimality gaps by 30-50% on large instances. Furthermore, our solver demonstrates unprecedented scalability: it provides non-trivial solutions for problems with up to 15,000 vertices and thousands of POIs, where prior state-of-the-art methods typically exhaust memory or fail to provide any meaningful optimality guarantees.
Routing and Control for Marine Oil-Spill Cleanup with a Boom-Towing Vessel Fleet
Mar 17, 2026Marine oil spills damage ecosystems, contaminate coastlines, and disrupt food webs, while imposing substantial economic losses on fisheries and coastal communities. Prior work has demonstrated the feasibility of containing and cleaning individual spills using a duo of autonomous surface vehicles (ASVs) equipped with a towed boom and skimmers. However, existing algorithmic approaches primarily address isolated slicks and individual ASV duos, lacking scalable methods for coordinating large robotic fleets across multiple spills representative of realistic oil-spill incidents. In this work, we propose an integrated multi-robot framework for coordinated oil-spill confinement and cleanup using autonomous ASV duos. We formulate multi-spill response as a risk-weighted minimum-latency problem, where spill-specific risk factors and service times jointly determine cumulative environmental damage. To solve this problem, we develop a hybrid optimization approach combining mixed-integer linear programming, and a tailored warm-start heuristic, enabling near-optimal routing plans for scenarios with tens of spills within minutes on commodity hardware. For physical execution, we design and analyze two tracking controllers for boom-towing ASV duos: a feedback-linearization controller with proven asymptotic stability, and a baseline PID controller. Simulation results under coupled vessel-boom dynamics demonstrate accurate path tracking for both controllers. Together, these components provide a scalable, holistic framework for rapid, risk-aware multi-robot response to large-scale oil spill disasters.
Motion Planning for Safe Landing of a Human-Piloted Parafoil
Dec 11, 2025Most skydiving accidents occur during the parafoil-piloting and landing stages and result from human lapses in judgment while piloting the parafoil. Training of novice pilots is protracted due to the lack of functional and easily accessible training simulators. Moreover, work on parafoil trajectory planning suitable for aiding human training remains limited. To bridge this gap, we study the problem of computing safe trajectories for human-piloted parafoil flight and examine how such trajectories fare against human-generated solutions. For the algorithmic part, we adapt the sampling-based motion planner Stable Sparse RRT (SST) by Li et al., to cope with the problem constraints while minimizing the bank angle (control effort) as a proxy for safety. We then compare the computer-generated solutions with data from human-generated parafoil flight, where the algorithm offers a relative cost improvement of 20\%-80\% over the performance of the human pilot. We observe that human pilots tend to, first, close the horizontal distance to the landing area, and then address the vertical gap by spiraling down to the suitable altitude for starting a landing maneuver. The algorithm considered here makes smoother and more gradual descents, arriving at the landing area at the precise altitude necessary for the final approach while maintaining safety constraints. Overall, the study demonstrates the potential of computer-generated guidelines, rather than traditional rules of thumb, which can be integrated into future simulators to train pilots for safer and more cost-effective flights.
Effective Game-Theoretic Motion Planning via Nested Search
Nov 11, 2025To facilitate effective, safe deployment in the real world, individual robots must reason about interactions with other agents, which often occur without explicit communication. Recent work has identified game theory, particularly the concept of Nash Equilibrium (NE), as a key enabler for behavior-aware decision-making. Yet, existing work falls short of fully unleashing the power of game-theoretic reasoning. Specifically, popular optimization-based methods require simplified robot dynamics and tend to get trapped in local minima due to convexification. Other works that rely on payoff matrices suffer from poor scalability due to the explicit enumeration of all possible trajectories. To bridge this gap, we introduce Game-Theoretic Nested Search (GTNS), a novel, scalable, and provably correct approach for computing NEs in general dynamical systems. GTNS efficiently searches the action space of all agents involved, while discarding trajectories that violate the NE constraint (no unilateral deviation) through an inner search over a lower-dimensional space. Our algorithm enables explicit selection among equilibria by utilizing a user-specified global objective, thereby capturing a rich set of realistic interactions. We demonstrate the approach on a variety of autonomous driving and racing scenarios where we achieve solutions in mere seconds on commodity hardware.
Train-Once Plan-Anywhere Kinodynamic Motion Planning via Diffusion Trees
Aug 28, 2025Kinodynamic motion planning is concerned with computing collision-free trajectories while abiding by the robot's dynamic constraints. This critical problem is often tackled using sampling-based planners (SBPs) that explore the robot's high-dimensional state space by constructing a search tree via action propagations. Although SBPs can offer global guarantees on completeness and solution quality, their performance is often hindered by slow exploration due to uninformed action sampling. Learning-based approaches can yield significantly faster runtimes, yet they fail to generalize to out-of-distribution (OOD) scenarios and lack critical guarantees, e.g., safety, thus limiting their deployment on physical robots. We present Diffusion Tree (DiTree): a \emph{provably-generalizable} framework leveraging diffusion policies (DPs) as informed samplers to efficiently guide state-space search within SBPs. DiTree combines DP's ability to model complex distributions of expert trajectories, conditioned on local observations, with the completeness of SBPs to yield \emph{provably-safe} solutions within a few action propagation iterations for complex dynamical systems. We demonstrate DiTree's power with an implementation combining the popular RRT planner with a DP action sampler trained on a \emph{single environment}. In comprehensive evaluations on OOD scenarios, % DiTree has comparable runtimes to a standalone DP (3x faster than classical SBPs), while improving the average success rate over DP and SBPs. DiTree is on average 3x faster than classical SBPs, and outperforms all other approaches by achieving roughly 30\% higher success rate. Project webpage: https://sites.google.com/view/ditree.
Effective Sampling for Robot Motion Planning Through the Lens of Lattices
Feb 07, 2025Sampling-based methods for motion planning, which capture the structure of the robot's free space via (typically random) sampling, have gained popularity due to their scalability, simplicity, and for offering global guarantees, such as probabilistic completeness and asymptotic optimality. Unfortunately, the practicality of those guarantees remains limited as they do not provide insights into the behavior of motion planners for a finite number of samples (i.e., a finite running time). In this work, we harness lattice theory and the concept of $(\delta,\epsilon)$-completeness by Tsao et al. (2020) to construct deterministic sample sets that endow their planners with strong finite-time guarantees while minimizing running time. In particular, we introduce a highly-efficient deterministic sampling approach based on the $A_d^*$ lattice, which is the best-known geometric covering in dimensions $\leq 21$. Using our new sampling approach, we obtain at least an order-of-magnitude speedup over existing deterministic and uniform random sampling methods for complex motion-planning problems. Overall, our work provides deep mathematical insights while advancing the practical applicability of sampling-based motion planning.
From Configuration-Space Clearance to Feature-Space Margin: Sample Complexity in Learning-Based Collision Detection
Feb 06, 2025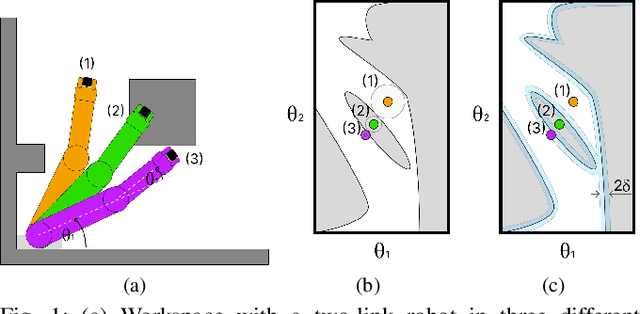
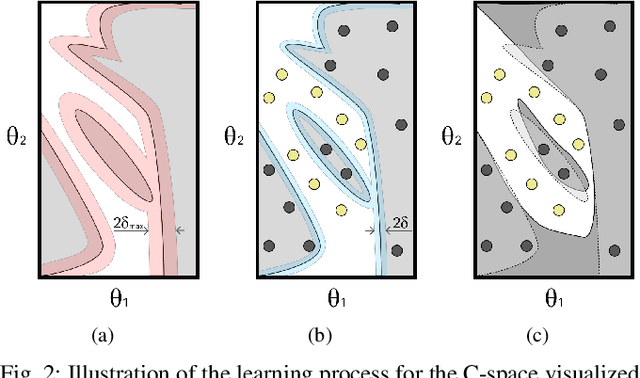
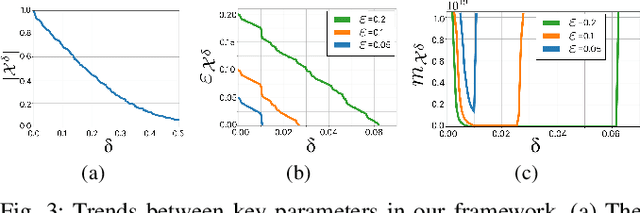
Motion planning is a central challenge in robotics, with learning-based approaches gaining significant attention in recent years. Our work focuses on a specific aspect of these approaches: using machine-learning techniques, particularly Support Vector Machines (SVM), to evaluate whether robot configurations are collision free, an operation termed ``collision detection''. Despite the growing popularity of these methods, there is a lack of theory supporting their efficiency and prediction accuracy. This is in stark contrast to the rich theoretical results of machine-learning methods in general and of SVMs in particular. Our work bridges this gap by analyzing the sample complexity of an SVM classifier for learning-based collision detection in motion planning. We bound the number of samples needed to achieve a specified accuracy at a given confidence level. This result is stated in terms relevant to robot motion-planning such as the system's clearance. Building on these theoretical results, we propose a collision-detection algorithm that can also provide statistical guarantees on the algorithm's error in classifying robot configurations as collision-free or not.
Impossibility of Self-Organized Aggregation without Computation
Dec 31, 2024



In their seminal work, Gauci et al. (2014) studied the fundamental task of aggregation, wherein multiple robots need to gather without an a priori agreed-upon meeting location, using minimal hardware. That paper considered differential-drive robots that are memoryless and unable to compute. Moreover, the robots cannot communicate with one another and are only equipped with a simple sensor that determines whether another robot is directly in front of them. Despite those severe limitations, Gauci et al. introduced a controller and proved mathematically that it aggregates a system of two robots for any initial state. Unfortunately, for larger systems, the same controller aggregates empirically in many cases but not all. Thus, the question of whether a controller exists that aggregates for any number of robots remains open. In this paper, we show that no such controller exists by investigating the geometric structure of controllers. In addition, we disprove the aggregation proof of the paper above for two robots and present an alternative controller alongside a simple and rigorous aggregation proof.
Inspection planning under execution uncertainty
Sep 12, 2023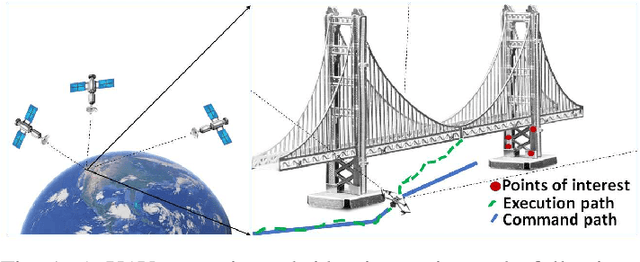
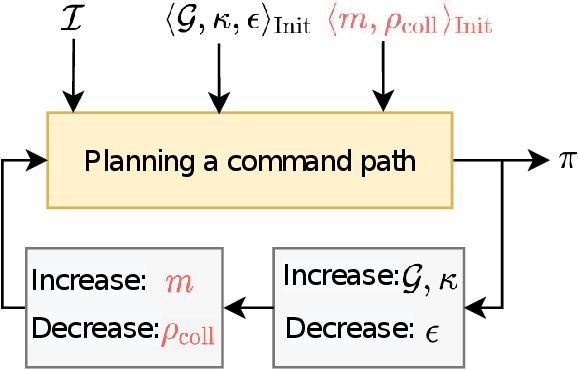
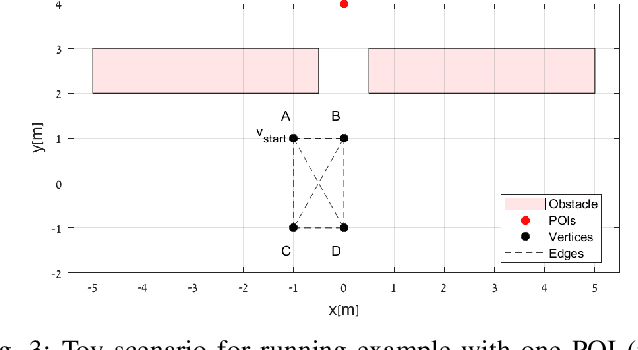
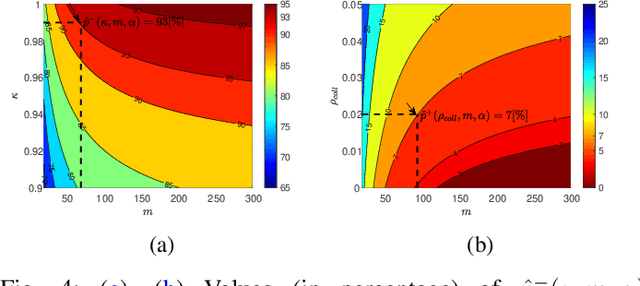
Autonomous inspection tasks necessitate effective path-planning mechanisms to efficiently gather observations from points of interest (POI). However, localization errors commonly encountered in urban environments can introduce execution uncertainty, posing challenges to the successful completion of such tasks. To tackle these challenges, we present IRIS-under uncertainty (IRIS-U^2), an extension of the incremental random inspection-roadmap search (IRIS) algorithm, that addresses the offline planning problem via an A*-based approach, where the planning process occurs prior the online execution. The key insight behind IRIS-U^2 is transforming the computed localization uncertainty, obtained through Monte Carlo (MC) sampling, into a POI probability. IRIS-U^2 offers insights into the expected performance of the execution task by providing confidence intervals (CI) for the expected coverage, expected path length, and collision probability, which becomes progressively tighter as the number of MC samples increase. The efficacy of IRIS-U^2 is demonstrated through a case study focusing on structural inspections of bridges. Our approach exhibits improved expected coverage, reduced collision probability, and yields increasingly-precise CIs as the number of MC samples grows. Furthermore, we emphasize the potential advantages of computing bounded sub-optimal solutions to reduce computation time while still maintaining the same CI boundaries.