 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSerendipitous Recommendation with Multimodal LLM
Jun 09, 2025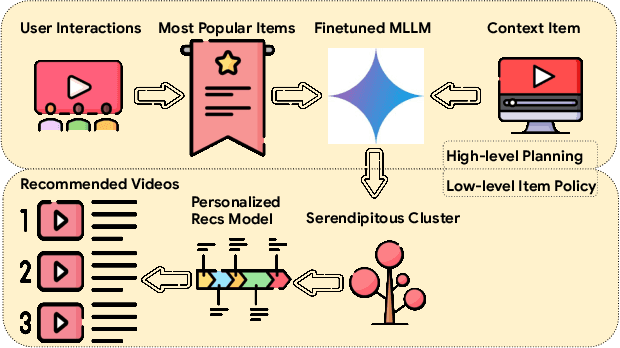
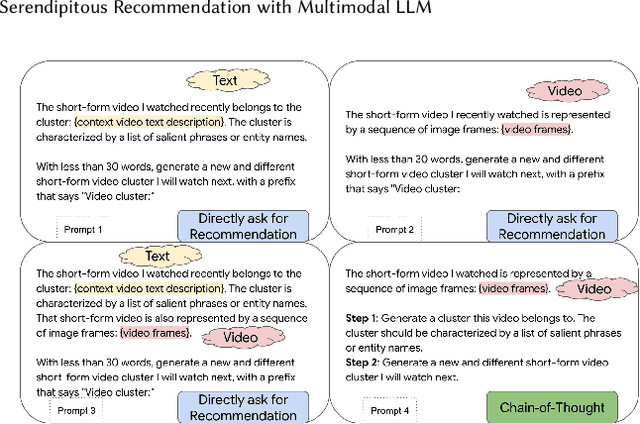
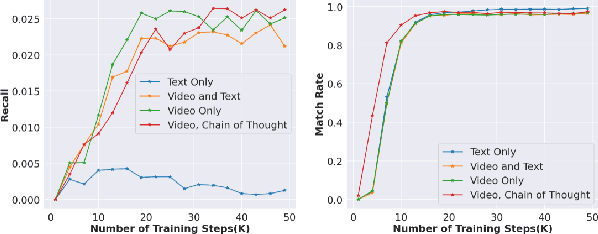
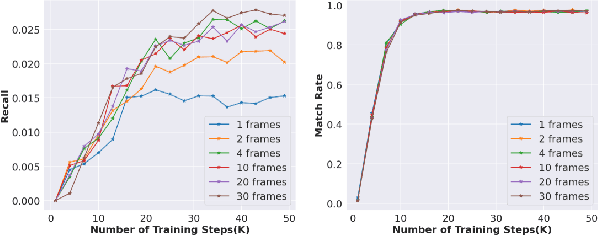
Conventional recommendation systems succeed in identifying relevant content but often fail to provide users with surprising or novel items. Multimodal Large Language Models (MLLMs) possess the world knowledge and multimodal understanding needed for serendipity, but their integration into billion-item-scale platforms presents significant challenges. In this paper, we propose a novel hierarchical framework where fine-tuned MLLMs provide high-level guidance to conventional recommendation models, steering them towards more serendipitous suggestions. This approach leverages MLLM strengths in understanding multimodal content and user interests while retaining the efficiency of traditional models for item-level recommendation. This mitigates the complexity of applying MLLMs directly to vast action spaces. We also demonstrate a chain-of-thought strategy enabling MLLMs to discover novel user interests by first understanding video content and then identifying relevant yet unexplored interest clusters. Through live experiments within a commercial short-form video platform serving billions of users, we show that our MLLM-powered approach significantly improves both recommendation serendipity and user satisfaction.
Autonomous Medical Needle Steering In Vivo
Nov 04, 2022The use of needles to access sites within organs is fundamental to many interventional medical procedures both for diagnosis and treatment. Safe and accurate navigation of a needle through living tissue to an intra-tissue target is currently often challenging or infeasible due to the presence of anatomical obstacles in the tissue, high levels of uncertainty, and natural tissue motion (e.g., due to breathing). Medical robots capable of automating needle-based procedures in vivo have the potential to overcome these challenges and enable an enhanced level of patient care and safety. In this paper, we show the first medical robot that autonomously navigates a needle inside living tissue around anatomical obstacles to an intra-tissue target. Our system leverages an aiming device and a laser-patterned highly flexible steerable needle, a type of needle capable of maneuvering along curvilinear trajectories to avoid obstacles. The autonomous robot accounts for anatomical obstacles and uncertainty in living tissue/needle interaction with replanning and control and accounts for respiratory motion by defining safe insertion time windows during the breathing cycle. We apply the system to lung biopsy, which is critical in the diagnosis of lung cancer, the leading cause of cancer-related death in the United States. We demonstrate successful performance of our system in multiple in vivo porcine studies and also demonstrate that our approach leveraging autonomous needle steering outperforms a standard manual clinical technique for lung nodule access.
Resolution-Optimal Motion Planning for Steerable Needles
Oct 06, 2021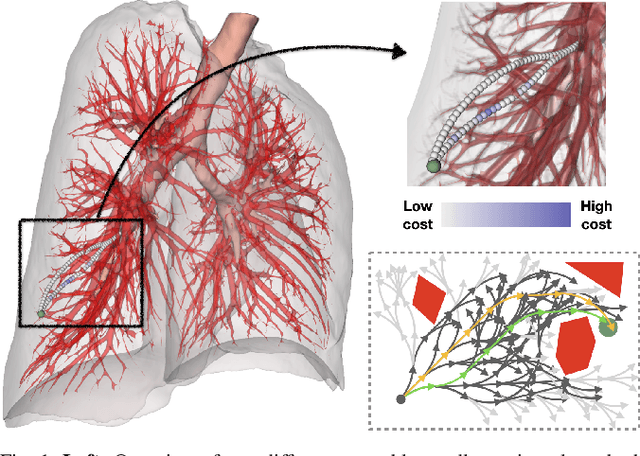
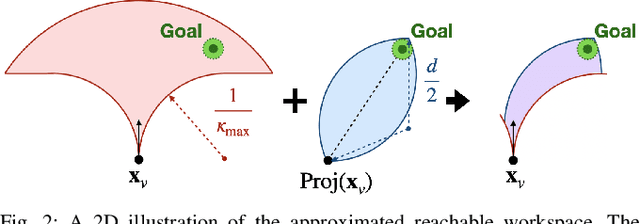
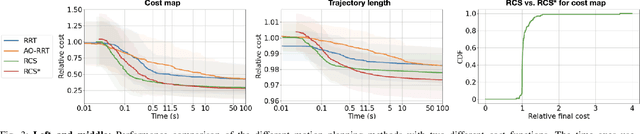
Medical steerable needles can follow 3D curvilinear trajectories inside body tissue, enabling them to move around critical anatomical structures and precisely reach clinically significant targets in a minimally invasive way. Automating needle steering, with motion planning as a key component, has the potential to maximize the accuracy, precision, speed, and safety of steerable needle procedures. In this paper, we introduce the first resolution-optimal motion planner for steerable needles that offers excellent practical performance in terms of runtime while simultaneously providing strong theoretical guarantees on completeness and the global optimality of the motion plan in finite time. Compared to state-of-the-art steerable needle motion planners, simulation experiments on realistic scenarios of lung biopsy demonstrate that our proposed planner is faster in generating higher-quality plans while incorporating clinically relevant cost functions. This indicates that the theoretical guarantees of the proposed planner have a practical impact on the motion plan quality, which is valuable for computing motion plans that minimize patient trauma.
Toward Certifiable Motion Planning for Medical Steerable Needles
Jul 11, 2021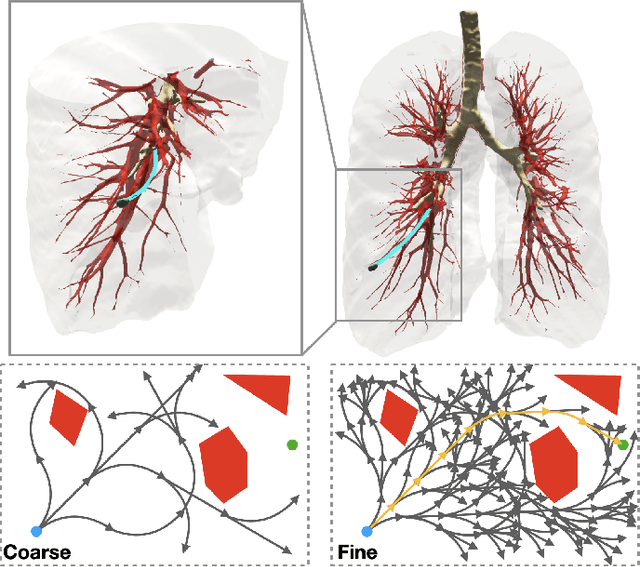
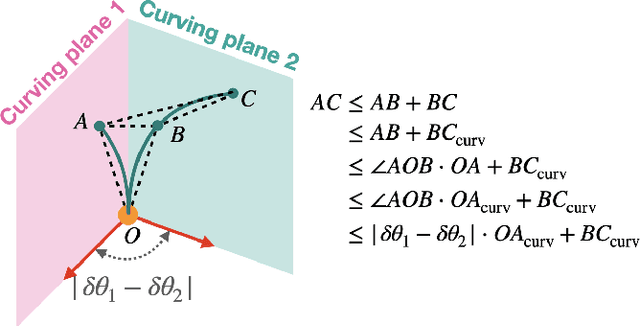
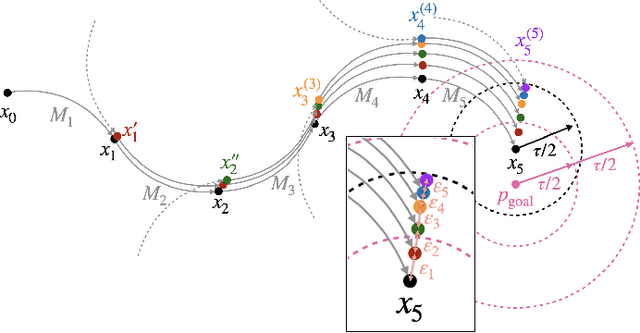
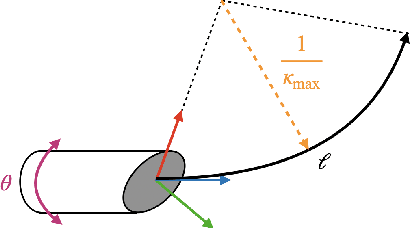
Medical steerable needles can move along 3D curvilinear trajectories to avoid anatomical obstacles and reach clinically significant targets inside the human body. Automating steerable needle procedures can enable physicians and patients to harness the full potential of steerable needles by maximally leveraging their steerability to safely and accurately reach targets for medical procedures such as biopsies and localized therapy delivery for cancer. For the automation of medical procedures to be clinically accepted, it is critical from a patient care, safety, and regulatory perspective to certify the correctness and effectiveness of the motion planning algorithms involved in procedure automation. In this paper, we take an important step toward creating a certifiable motion planner for steerable needles. We introduce the first motion planner for steerable needles that offers a guarantee, under clinically appropriate assumptions, that it will, in finite time, compute an exact, obstacle-avoiding motion plan to a specified target, or notify the user that no such plan exists. We present an efficient, resolution-complete motion planner for steerable needles based on a novel adaptation of multi-resolution planning. Compared to state-of-the-art steerable needle motion planners (none of which provide any completeness guarantees), we demonstrate that our new resolution-complete motion planner computes plans faster and with a higher success rate.
Computationally-Efficient Roadmap-based Inspection Planning via Incremental Lazy Search
Mar 25, 2021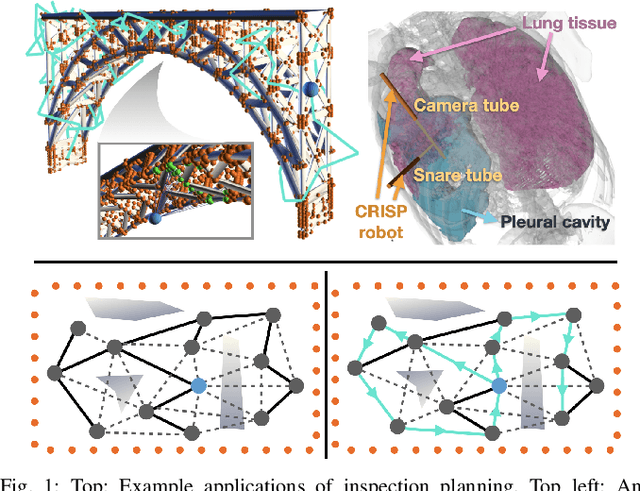
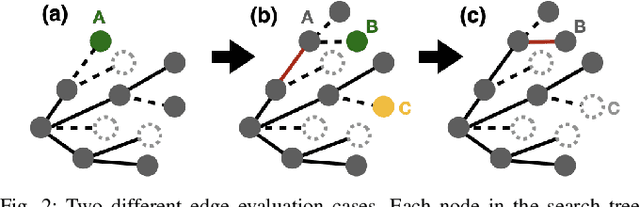
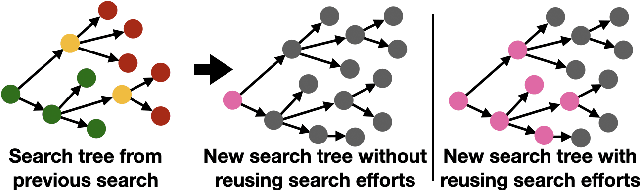
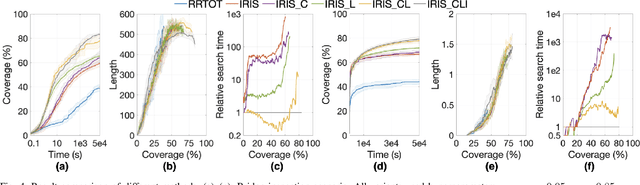
The inspection-planning problem calls for computing motions for a robot that allow it to inspect a set of points of interest (POIs) while considering plan quality (e.g., plan length). This problem has applications across many domains where robots can help with inspection, including infrastructure maintenance, construction, and surgery. Incremental Random Inspection-roadmap Search (IRIS) is an asymptotically-optimal inspection planner that was shown to compute higher-quality inspection plans orders of magnitudes faster than the prior state-of-the-art method. In this paper, we significantly accelerate the performance of IRIS to broaden its applicability to more challenging real-world applications. A key computational challenge that IRIS faces is effectively searching roadmaps for inspection plans -- a procedure that dominates its running time. In this work, we show how to incorporate lazy edge-evaluation techniques into \iris's search algorithm and how to reuse search efforts when a roadmap undergoes local changes. These enhancements, which do not compromise IRIS's asymptotic optimality, enable us to compute inspection plans much faster than the original IRIS. We apply IRIS with the enhancements to simulated bridge inspection and surgical inspection tasks and show that our new algorithm for some scenarios can compute similar-quality inspection plans 570x faster than prior work.
Toward Asymptotically-Optimal Inspection Planning via Efficient Near-Optimal Graph Search
Jul 01, 2019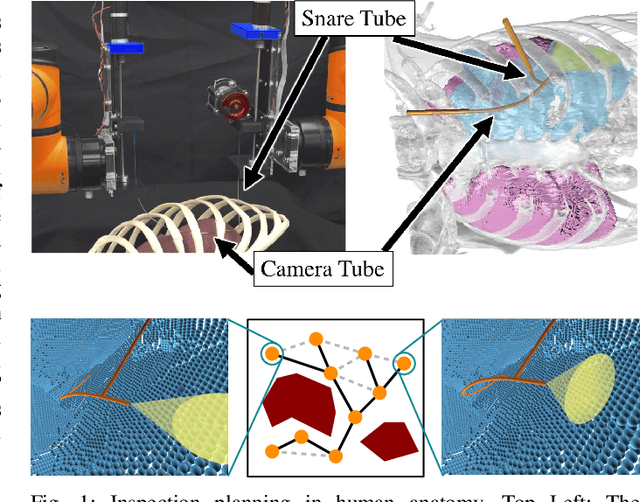

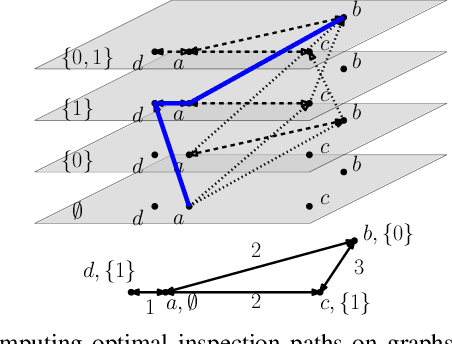

Inspection planning, the task of planning motions that allow a robot to inspect a set of points of interest, has applications in domains such as industrial, field, and medical robotics. Inspection planning can be computationally challenging, as the search space over motion plans that inspect the points of interest grows exponentially with the number of inspected points. We propose a novel method, Incremental Random Inspection-roadmap Search (IRIS), that computes inspection plans whose length and set of inspected points asymptotically converge to those of an optimal inspection plan. IRIS incrementally densifies a motion planning roadmap using sampling-based algorithms, and performs efficient near-optimal graph search over the resulting roadmap as it is generated. We demonstrate IRIS's efficacy on a simulated planar 5DOF manipulator inspection task and on a medical endoscopic inspection task for a continuum parallel surgical robot in anatomy segmented from patient CT data. We show that IRIS computes higher-quality inspection paths orders of magnitudes faster than a prior state-of-the-art method.