 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Start Regions for Medical Steerable Needle Automation
Apr 12, 2024Steerable needles are minimally invasive devices that enable novel medical procedures by following curved paths to avoid critical anatomical obstacles. Planning algorithms can be used to find a steerable needle motion plan to a target. Deployment typically consists of a physician manually inserting the steerable needle into tissue at the motion plan's start pose and handing off control to a robot, which then autonomously steers it to the target along the plan. The handoff between human and robot is critical for procedure success, as even small deviations from the start pose change the steerable needle's workspace and there is no guarantee that the target will still be reachable. We introduce a metric that evaluates the robustness to such start pose deviations. When measuring this robustness to deviations, we consider the tradeoff between being robust to changes in position versus changes in orientation. We evaluate our metric through simulation in an abstract, a liver, and a lung planning scenario. Our evaluation shows that our metric can be combined with different motion planners and that it efficiently determines large, safe start regions.
A Dataset of Anatomical Environments for Medical Robots: Modeling Respiratory Deformation
Oct 06, 2023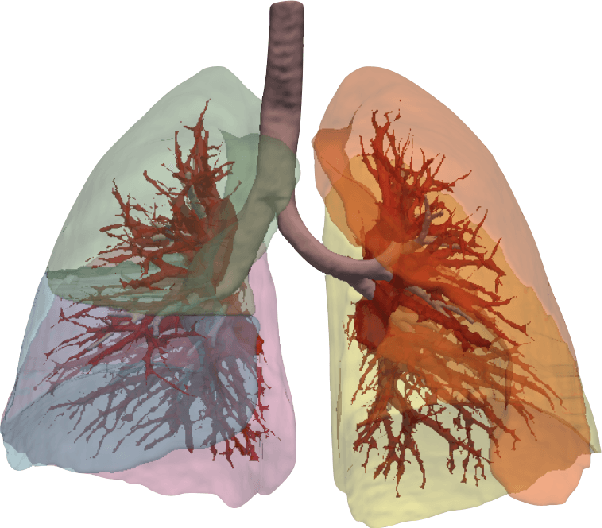

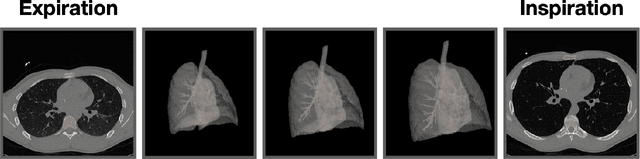
Anatomical models of a medical robot's environment can significantly help guide design and development of a new robotic system. These models can be used for benchmarking motion planning algorithms, evaluating controllers, optimizing mechanical design choices, simulating procedures, and even as resources for data generation. Currently, the time-consuming task of generating these environments is repeatedly performed by individual research groups and rarely shared broadly. This not only leads to redundant efforts, but also makes it challenging to compare systems and algorithms accurately. In this work, we present a collection of clinically-relevant anatomical environments for medical robots operating in the lungs. Since anatomical deformation is a fundamental challenge for medical robots operating in the lungs, we describe a way to model respiratory deformation in these environments using patient-derived data. We share the environments and deformation data publicly by adding them to the Medical Robotics Anatomical Dataset (Med-RAD), our public dataset of anatomical environments for medical robots.
Autonomous Medical Needle Steering In Vivo
Nov 04, 2022The use of needles to access sites within organs is fundamental to many interventional medical procedures both for diagnosis and treatment. Safe and accurate navigation of a needle through living tissue to an intra-tissue target is currently often challenging or infeasible due to the presence of anatomical obstacles in the tissue, high levels of uncertainty, and natural tissue motion (e.g., due to breathing). Medical robots capable of automating needle-based procedures in vivo have the potential to overcome these challenges and enable an enhanced level of patient care and safety. In this paper, we show the first medical robot that autonomously navigates a needle inside living tissue around anatomical obstacles to an intra-tissue target. Our system leverages an aiming device and a laser-patterned highly flexible steerable needle, a type of needle capable of maneuvering along curvilinear trajectories to avoid obstacles. The autonomous robot accounts for anatomical obstacles and uncertainty in living tissue/needle interaction with replanning and control and accounts for respiratory motion by defining safe insertion time windows during the breathing cycle. We apply the system to lung biopsy, which is critical in the diagnosis of lung cancer, the leading cause of cancer-related death in the United States. We demonstrate successful performance of our system in multiple in vivo porcine studies and also demonstrate that our approach leveraging autonomous needle steering outperforms a standard manual clinical technique for lung nodule access.