 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Dataset of Anatomical Environments for Medical Robots: Modeling Respiratory Deformation
Oct 06, 2023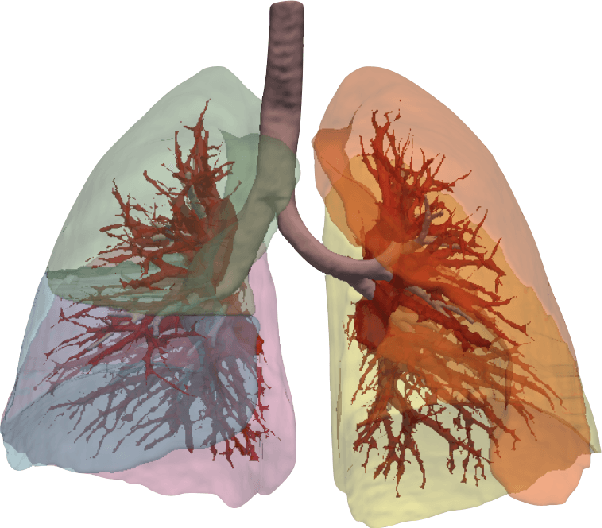

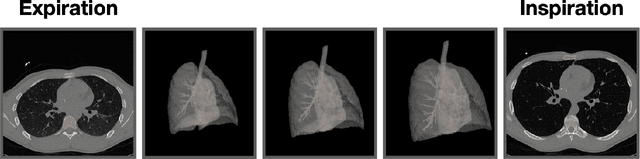
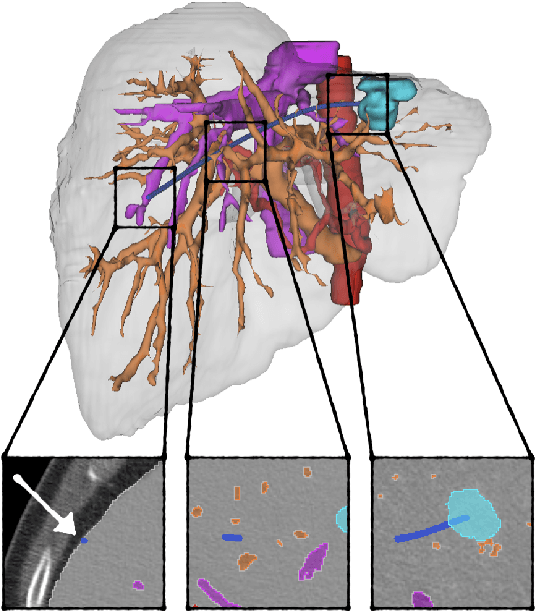
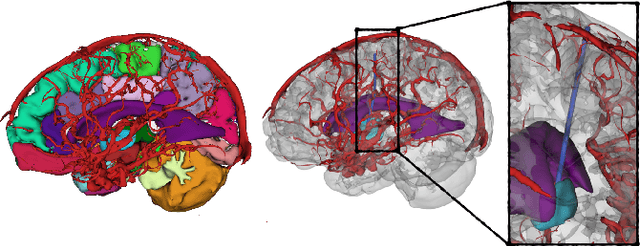
Anatomical models of a medical robot's environment can significantly help guide design and development of a new robotic system. These models can be used for benchmarking motion planning algorithms, evaluating controllers, optimizing mechanical design choices, simulating procedures, and even as resources for data generation. Currently, the time-consuming task of generating these environments is repeatedly performed by individual research groups and rarely shared broadly. This not only leads to redundant efforts, but also makes it challenging to compare systems and algorithms accurately. In this work, we present a collection of clinically-relevant anatomical environments for medical robots operating in the lungs. Since anatomical deformation is a fundamental challenge for medical robots operating in the lungs, we describe a way to model respiratory deformation in these environments using patient-derived data. We share the environments and deformation data publicly by adding them to the Medical Robotics Anatomical Dataset (Med-RAD), our public dataset of anatomical environments for medical robots.
A Clinical Dataset for the Evaluation of Motion Planners in Medical Applications
Oct 19, 2022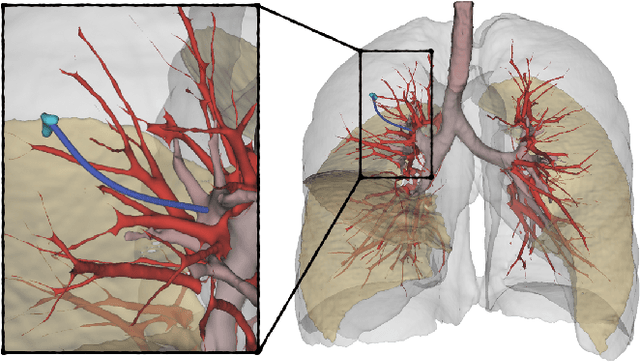
The prospect of using autonomous robots to enhance the capabilities of physicians and enable novel procedures has led to considerable efforts in developing medical robots and incorporating autonomous capabilities. Motion planning is a core component for any such system working in an environment that demands near perfect levels of safety, reliability, and precision. Despite the extensive and promising work that has gone into developing motion planners for medical robots, a standardized and clinically-meaningful way to compare existing algorithms and evaluate novel planners and robots is not well established. We present the Medical Motion Planning Dataset (Med-MPD), a publicly-available dataset of real clinical scenarios in various organs for the purpose of evaluating motion planners for minimally-invasive medical robots. Our goal is that this dataset serve as a first step towards creating a larger robust medical motion planning benchmark framework, advance research into medical motion planners, and lift some of the burden of generating medical evaluation data.