 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
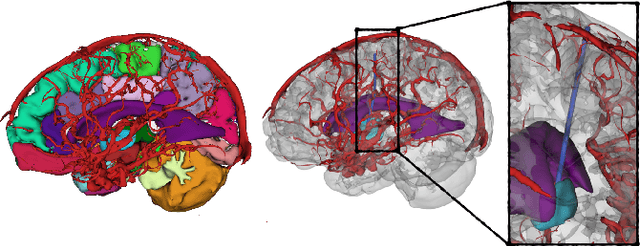
Add to EdgeContact-aware Path Planning for Autonomous Neuroendovascular Navigation
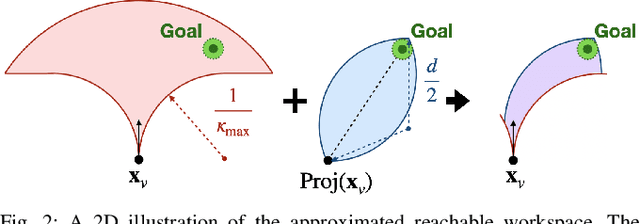
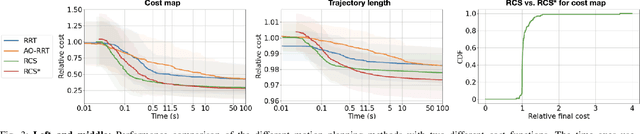
Jan 12, 2026We propose a deterministic and time-efficient contact-aware path planner for neurovascular navigation. The algorithm leverages information from pre- and intra-operative images of the vessels to navigate pre-bent passive tools, by intelligently predicting and exploiting interactions with the anatomy. A kinematic model is derived and employed by the sampling-based planner for tree expansion that utilizes simplified motion primitives. This approach enables fast computation of the feasible path, with negligible loss in accuracy, as demonstrated in diverse and representative anatomies of the vessels. In these anatomical demonstrators, the algorithm shows a 100% convergence rate within 22.8s in the worst case, with sub-millimeter tracking errors (less than 0.64 mm), and is found effective on anatomical phantoms representative of around 94% of patients.
Generalizing Multi-Objective Search via Objective-Aggregation Functions
Sep 26, 2025Multi-objective search (MOS) has become essential in robotics, as real-world robotic systems need to simultaneously balance multiple, often conflicting objectives. Recent works explore complex interactions between objectives, leading to problem formulations that do not allow the usage of out-of-the-box state-of-the-art MOS algorithms. In this paper, we suggest a generalized problem formulation that optimizes solution objectives via aggregation functions of hidden (search) objectives. We show that our formulation supports the application of standard MOS algorithms, necessitating only to properly extend several core operations to reflect the specific aggregation functions employed. We demonstrate our approach in several diverse robotics planning problems, spanning motion-planning for navigation, manipulation and planning fr medical systems under obstacle uncertainty as well as inspection planning, and route planning with different road types. We solve the problems using state-of-the-art MOS algorithms after properly extending their core operations, and provide empirical evidence that they outperform by orders of magnitude the vanilla versions of the algorithms applied to the same problems but without objective aggregation.
VIN-NBV: A View Introspection Network for Next-Best-View Selection for Resource-Efficient 3D Reconstruction
May 09, 2025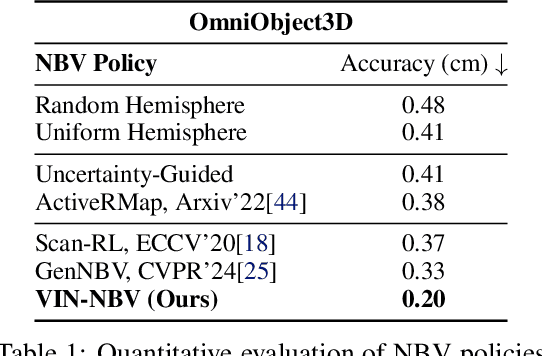
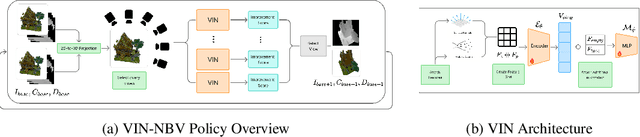
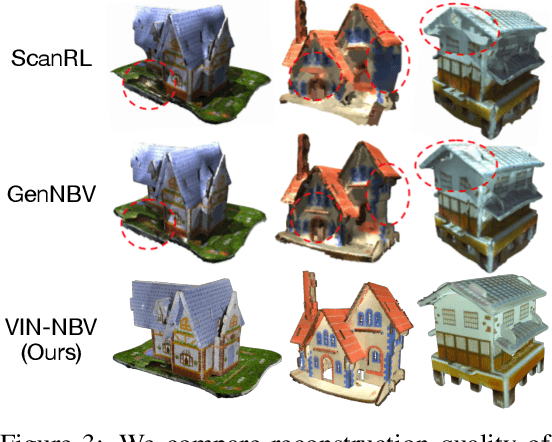
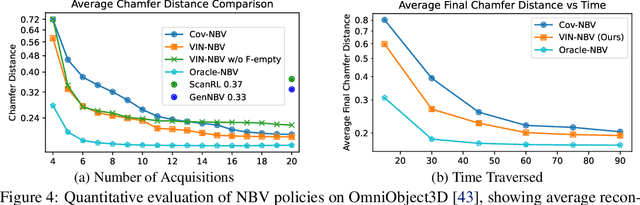
Next Best View (NBV) algorithms aim to acquire an optimal set of images using minimal resources, time, or number of captures to enable efficient 3D reconstruction of a scene. Existing approaches often rely on prior scene knowledge or additional image captures and often develop policies that maximize coverage. Yet, for many real scenes with complex geometry and self-occlusions, coverage maximization does not lead to better reconstruction quality directly. In this paper, we propose the View Introspection Network (VIN), which is trained to predict the reconstruction quality improvement of views directly, and the VIN-NBV policy. A greedy sequential sampling-based policy, where at each acquisition step, we sample multiple query views and choose the one with the highest VIN predicted improvement score. We design the VIN to perform 3D-aware featurization of the reconstruction built from prior acquisitions, and for each query view create a feature that can be decoded into an improvement score. We then train the VIN using imitation learning to predict the reconstruction improvement score. We show that VIN-NBV improves reconstruction quality by ~30% over a coverage maximization baseline when operating with constraints on the number of acquisitions or the time in motion.
Safe Start Regions for Medical Steerable Needle Automation
Apr 12, 2024



Steerable needles are minimally invasive devices that enable novel medical procedures by following curved paths to avoid critical anatomical obstacles. Planning algorithms can be used to find a steerable needle motion plan to a target. Deployment typically consists of a physician manually inserting the steerable needle into tissue at the motion plan's start pose and handing off control to a robot, which then autonomously steers it to the target along the plan. The handoff between human and robot is critical for procedure success, as even small deviations from the start pose change the steerable needle's workspace and there is no guarantee that the target will still be reachable. We introduce a metric that evaluates the robustness to such start pose deviations. When measuring this robustness to deviations, we consider the tradeoff between being robust to changes in position versus changes in orientation. We evaluate our metric through simulation in an abstract, a liver, and a lung planning scenario. Our evaluation shows that our metric can be combined with different motion planners and that it efficiently determines large, safe start regions.
A Dataset of Anatomical Environments for Medical Robots: Modeling Respiratory Deformation
Oct 06, 2023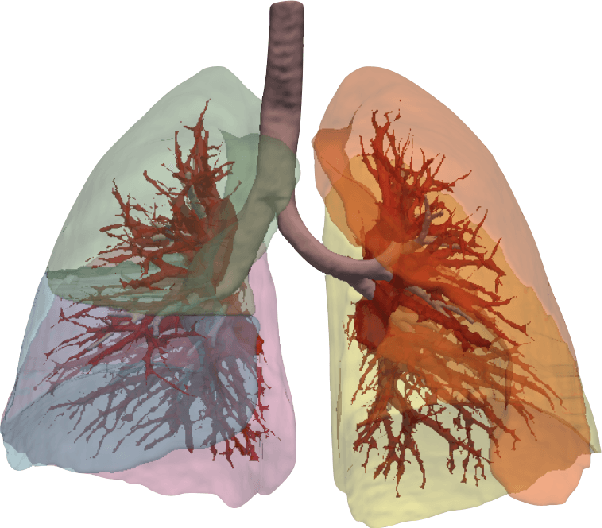

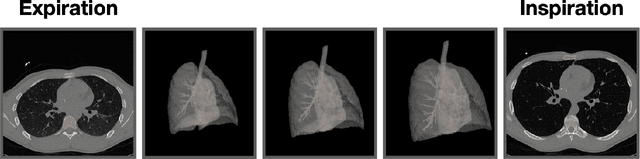
Anatomical models of a medical robot's environment can significantly help guide design and development of a new robotic system. These models can be used for benchmarking motion planning algorithms, evaluating controllers, optimizing mechanical design choices, simulating procedures, and even as resources for data generation. Currently, the time-consuming task of generating these environments is repeatedly performed by individual research groups and rarely shared broadly. This not only leads to redundant efforts, but also makes it challenging to compare systems and algorithms accurately. In this work, we present a collection of clinically-relevant anatomical environments for medical robots operating in the lungs. Since anatomical deformation is a fundamental challenge for medical robots operating in the lungs, we describe a way to model respiratory deformation in these environments using patient-derived data. We share the environments and deformation data publicly by adding them to the Medical Robotics Anatomical Dataset (Med-RAD), our public dataset of anatomical environments for medical robots.
Autonomous Medical Needle Steering In Vivo
Nov 04, 2022The use of needles to access sites within organs is fundamental to many interventional medical procedures both for diagnosis and treatment. Safe and accurate navigation of a needle through living tissue to an intra-tissue target is currently often challenging or infeasible due to the presence of anatomical obstacles in the tissue, high levels of uncertainty, and natural tissue motion (e.g., due to breathing). Medical robots capable of automating needle-based procedures in vivo have the potential to overcome these challenges and enable an enhanced level of patient care and safety. In this paper, we show the first medical robot that autonomously navigates a needle inside living tissue around anatomical obstacles to an intra-tissue target. Our system leverages an aiming device and a laser-patterned highly flexible steerable needle, a type of needle capable of maneuvering along curvilinear trajectories to avoid obstacles. The autonomous robot accounts for anatomical obstacles and uncertainty in living tissue/needle interaction with replanning and control and accounts for respiratory motion by defining safe insertion time windows during the breathing cycle. We apply the system to lung biopsy, which is critical in the diagnosis of lung cancer, the leading cause of cancer-related death in the United States. We demonstrate successful performance of our system in multiple in vivo porcine studies and also demonstrate that our approach leveraging autonomous needle steering outperforms a standard manual clinical technique for lung nodule access.
A Clinical Dataset for the Evaluation of Motion Planners in Medical Applications
Oct 19, 2022
The prospect of using autonomous robots to enhance the capabilities of physicians and enable novel procedures has led to considerable efforts in developing medical robots and incorporating autonomous capabilities. Motion planning is a core component for any such system working in an environment that demands near perfect levels of safety, reliability, and precision. Despite the extensive and promising work that has gone into developing motion planners for medical robots, a standardized and clinically-meaningful way to compare existing algorithms and evaluate novel planners and robots is not well established. We present the Medical Motion Planning Dataset (Med-MPD), a publicly-available dataset of real clinical scenarios in various organs for the purpose of evaluating motion planners for minimally-invasive medical robots. Our goal is that this dataset serve as a first step towards creating a larger robust medical motion planning benchmark framework, advance research into medical motion planners, and lift some of the burden of generating medical evaluation data.
Resolution-Optimal Motion Planning for Steerable Needles
Oct 06, 2021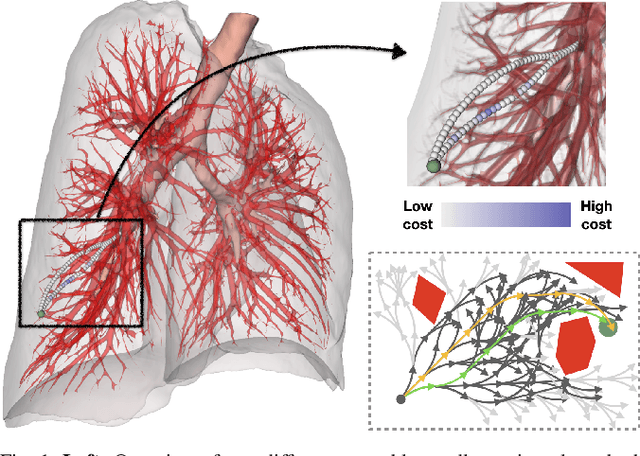
Medical steerable needles can follow 3D curvilinear trajectories inside body tissue, enabling them to move around critical anatomical structures and precisely reach clinically significant targets in a minimally invasive way. Automating needle steering, with motion planning as a key component, has the potential to maximize the accuracy, precision, speed, and safety of steerable needle procedures. In this paper, we introduce the first resolution-optimal motion planner for steerable needles that offers excellent practical performance in terms of runtime while simultaneously providing strong theoretical guarantees on completeness and the global optimality of the motion plan in finite time. Compared to state-of-the-art steerable needle motion planners, simulation experiments on realistic scenarios of lung biopsy demonstrate that our proposed planner is faster in generating higher-quality plans while incorporating clinically relevant cost functions. This indicates that the theoretical guarantees of the proposed planner have a practical impact on the motion plan quality, which is valuable for computing motion plans that minimize patient trauma.
Toward Certifiable Motion Planning for Medical Steerable Needles
Jul 11, 2021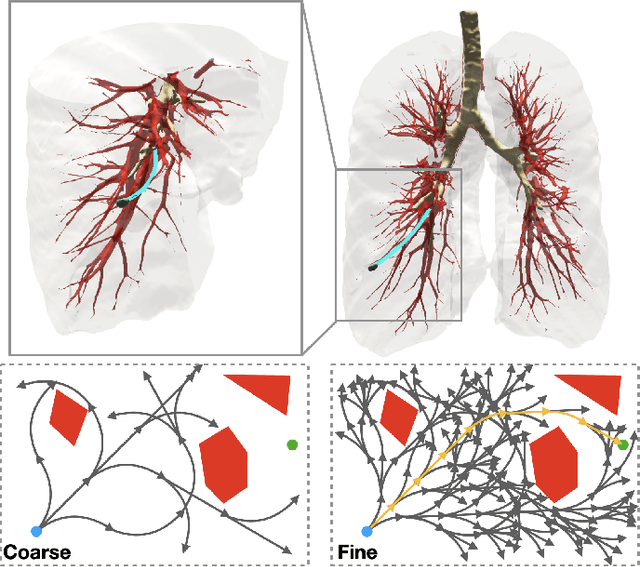
Medical steerable needles can move along 3D curvilinear trajectories to avoid anatomical obstacles and reach clinically significant targets inside the human body. Automating steerable needle procedures can enable physicians and patients to harness the full potential of steerable needles by maximally leveraging their steerability to safely and accurately reach targets for medical procedures such as biopsies and localized therapy delivery for cancer. For the automation of medical procedures to be clinically accepted, it is critical from a patient care, safety, and regulatory perspective to certify the correctness and effectiveness of the motion planning algorithms involved in procedure automation. In this paper, we take an important step toward creating a certifiable motion planner for steerable needles. We introduce the first motion planner for steerable needles that offers a guarantee, under clinically appropriate assumptions, that it will, in finite time, compute an exact, obstacle-avoiding motion plan to a specified target, or notify the user that no such plan exists. We present an efficient, resolution-complete motion planner for steerable needles based on a novel adaptation of multi-resolution planning. Compared to state-of-the-art steerable needle motion planners (none of which provide any completeness guarantees), we demonstrate that our new resolution-complete motion planner computes plans faster and with a higher success rate.
Computationally-Efficient Roadmap-based Inspection Planning via Incremental Lazy Search
Mar 25, 2021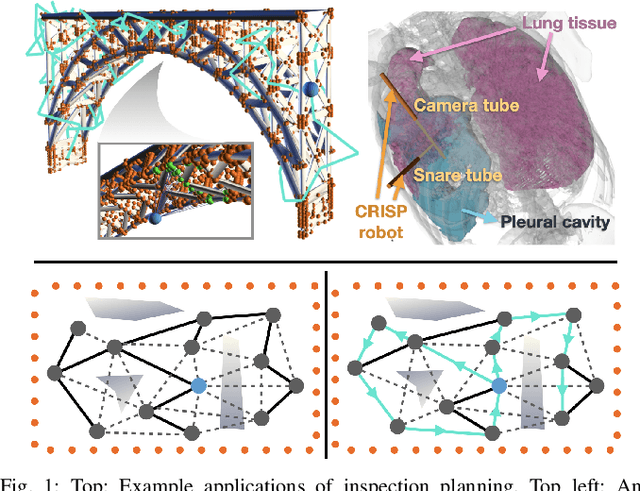
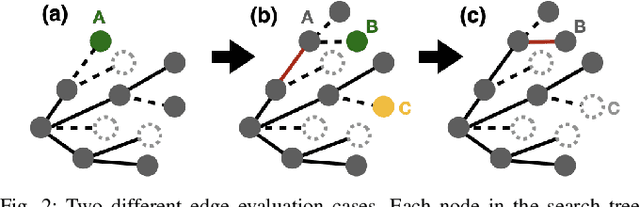
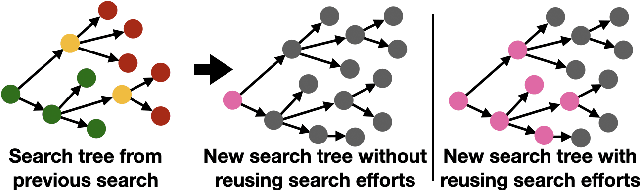
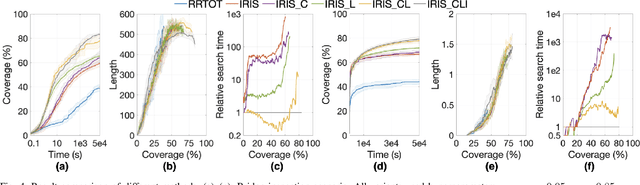
The inspection-planning problem calls for computing motions for a robot that allow it to inspect a set of points of interest (POIs) while considering plan quality (e.g., plan length). This problem has applications across many domains where robots can help with inspection, including infrastructure maintenance, construction, and surgery. Incremental Random Inspection-roadmap Search (IRIS) is an asymptotically-optimal inspection planner that was shown to compute higher-quality inspection plans orders of magnitudes faster than the prior state-of-the-art method. In this paper, we significantly accelerate the performance of IRIS to broaden its applicability to more challenging real-world applications. A key computational challenge that IRIS faces is effectively searching roadmaps for inspection plans -- a procedure that dominates its running time. In this work, we show how to incorporate lazy edge-evaluation techniques into \iris's search algorithm and how to reuse search efforts when a roadmap undergoes local changes. These enhancements, which do not compromise IRIS's asymptotic optimality, enable us to compute inspection plans much faster than the original IRIS. We apply IRIS with the enhancements to simulated bridge inspection and surgical inspection tasks and show that our new algorithm for some scenarios can compute similar-quality inspection plans 570x faster than prior work.