 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVIN-NBV: A View Introspection Network for Next-Best-View Selection for Resource-Efficient 3D Reconstruction
May 09, 2025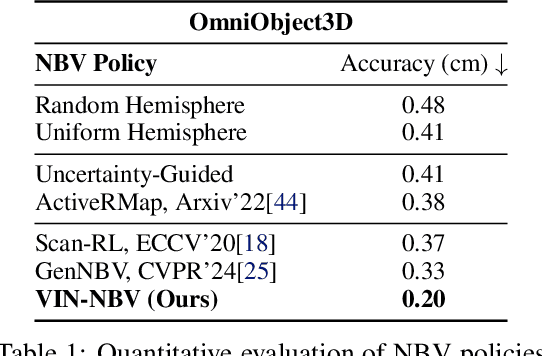
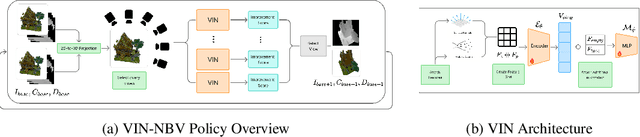
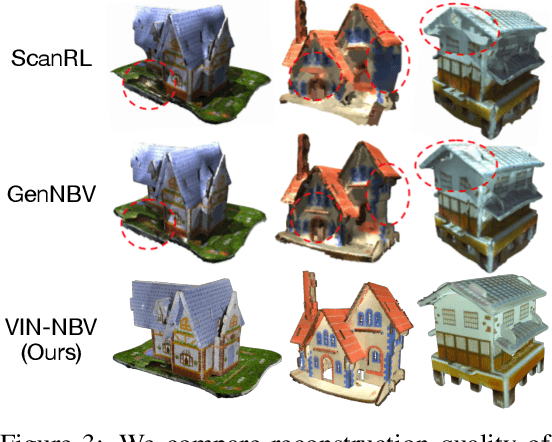
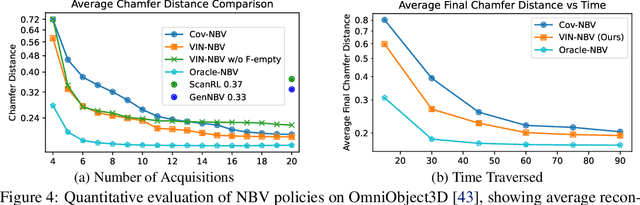
Next Best View (NBV) algorithms aim to acquire an optimal set of images using minimal resources, time, or number of captures to enable efficient 3D reconstruction of a scene. Existing approaches often rely on prior scene knowledge or additional image captures and often develop policies that maximize coverage. Yet, for many real scenes with complex geometry and self-occlusions, coverage maximization does not lead to better reconstruction quality directly. In this paper, we propose the View Introspection Network (VIN), which is trained to predict the reconstruction quality improvement of views directly, and the VIN-NBV policy. A greedy sequential sampling-based policy, where at each acquisition step, we sample multiple query views and choose the one with the highest VIN predicted improvement score. We design the VIN to perform 3D-aware featurization of the reconstruction built from prior acquisitions, and for each query view create a feature that can be decoded into an improvement score. We then train the VIN using imitation learning to predict the reconstruction improvement score. We show that VIN-NBV improves reconstruction quality by ~30% over a coverage maximization baseline when operating with constraints on the number of acquisitions or the time in motion.
PPS-Ctrl: Controllable Sim-to-Real Translation for Colonoscopy Depth Estimation
Apr 23, 2025Accurate depth estimation enhances endoscopy navigation and diagnostics, but obtaining ground-truth depth in clinical settings is challenging. Synthetic datasets are often used for training, yet the domain gap limits generalization to real data. We propose a novel image-to-image translation framework that preserves structure while generating realistic textures from clinical data. Our key innovation integrates Stable Diffusion with ControlNet, conditioned on a latent representation extracted from a Per-Pixel Shading (PPS) map. PPS captures surface lighting effects, providing a stronger structural constraint than depth maps. Experiments show our approach produces more realistic translations and improves depth estimation over GAN-based MI-CycleGAN. Our code is publicly accessible at https://github.com/anaxqx/PPS-Ctrl.
NFL-BA: Improving Endoscopic SLAM with Near-Field Light Bundle Adjustment
Dec 17, 2024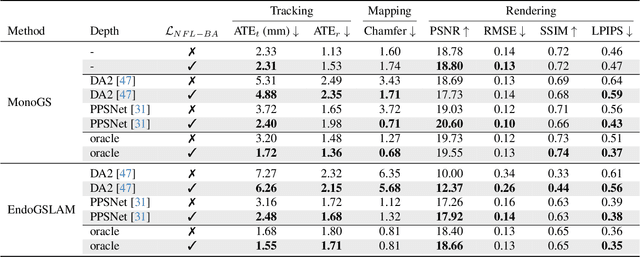
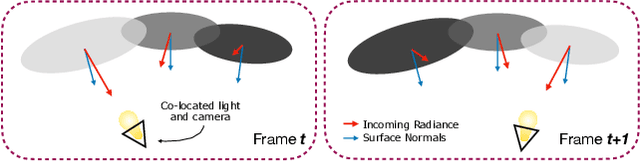
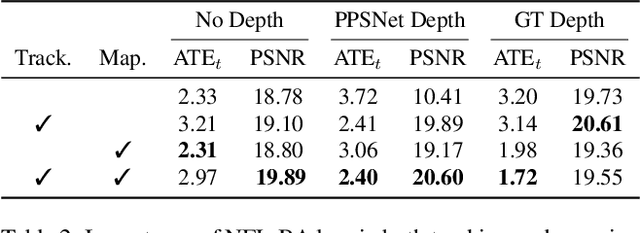
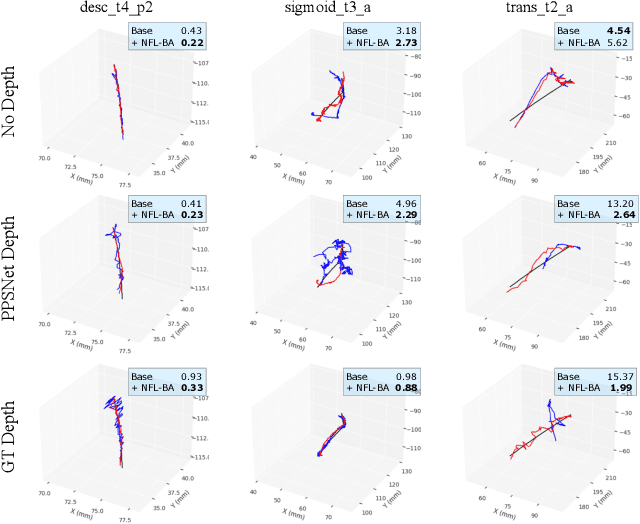
Simultaneous Localization And Mapping (SLAM) from a monocular endoscopy video can enable autonomous navigation, guidance to unsurveyed regions, and 3D visualizations, which can significantly improve endoscopy experience for surgeons and patient outcomes. Existing dense SLAM algorithms often assume distant and static lighting and textured surfaces, and alternate between optimizing scene geometry and camera parameters by minimizing a photometric rendering loss, often called Photometric Bundle Adjustment. However, endoscopic environments exhibit dynamic near-field lighting due to the co-located light and camera moving extremely close to the surface, textureless surfaces, and strong specular reflections due to mucus layers. When not considered, these near-field lighting effects can cause significant performance reductions for existing SLAM algorithms from indoor/outdoor scenes when applied to endoscopy videos. To mitigate this problem, we introduce a new Near-Field Lighting Bundle Adjustment Loss $(L_{NFL-BA})$ that can also be alternatingly optimized, along with the Photometric Bundle Adjustment loss, such that the captured images' intensity variations match the relative distance and orientation between the surface and the co-located light and camera. We derive a general NFL-BA loss function for 3D Gaussian surface representations and demonstrate that adding $L_{NFL-BA}$ can significantly improve the tracking and mapping performance of two state-of-the-art 3DGS-SLAM systems, MonoGS (35% improvement in tracking, 48% improvement in mapping with predicted depth maps) and EndoGSLAM (22% improvement in tracking, marginal improvement in mapping with predicted depths), on the C3VD endoscopy dataset for colons. The project page is available at https://asdunnbe.github.io/NFL-BA/