 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Medical Needle Steering In Vivo
Nov 04, 2022The use of needles to access sites within organs is fundamental to many interventional medical procedures both for diagnosis and treatment. Safe and accurate navigation of a needle through living tissue to an intra-tissue target is currently often challenging or infeasible due to the presence of anatomical obstacles in the tissue, high levels of uncertainty, and natural tissue motion (e.g., due to breathing). Medical robots capable of automating needle-based procedures in vivo have the potential to overcome these challenges and enable an enhanced level of patient care and safety. In this paper, we show the first medical robot that autonomously navigates a needle inside living tissue around anatomical obstacles to an intra-tissue target. Our system leverages an aiming device and a laser-patterned highly flexible steerable needle, a type of needle capable of maneuvering along curvilinear trajectories to avoid obstacles. The autonomous robot accounts for anatomical obstacles and uncertainty in living tissue/needle interaction with replanning and control and accounts for respiratory motion by defining safe insertion time windows during the breathing cycle. We apply the system to lung biopsy, which is critical in the diagnosis of lung cancer, the leading cause of cancer-related death in the United States. We demonstrate successful performance of our system in multiple in vivo porcine studies and also demonstrate that our approach leveraging autonomous needle steering outperforms a standard manual clinical technique for lung nodule access.
A Recurrent Neural Network Approach to Roll Estimation for Needle Steering
Jan 13, 2021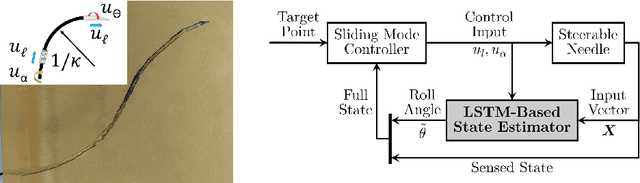
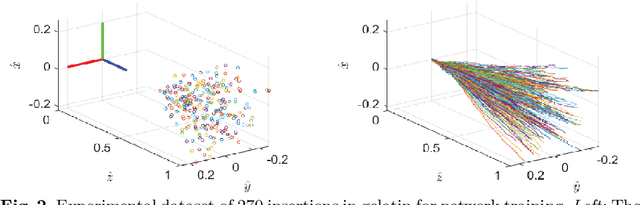
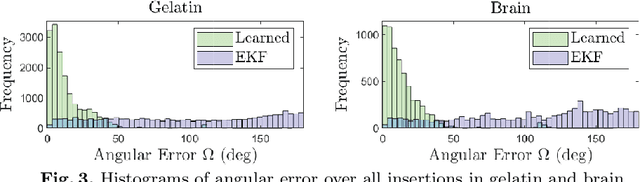
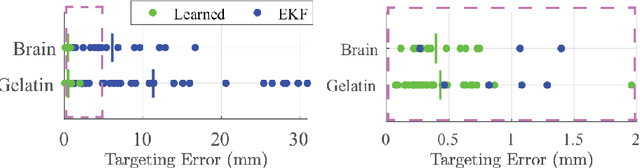
Steerable needles are a promising technology for delivering targeted therapies in the body in a minimally-invasive fashion, as they can curve around anatomical obstacles and hone in on anatomical targets. In order to accurately steer them, controllers must have full knowledge of the needle tip's orientation. However, current sensors either do not provide full orientation information or interfere with the needle's ability to deliver therapy. Further, torsional dynamics can vary and depend on many parameters making steerable needles difficult to accurately model, limiting the effectiveness of traditional observer methods. To overcome these limitations, we propose a model-free, learned-method that leverages LSTM neural networks to estimate the needle tip's orientation online. We validate our method by integrating it into a sliding-mode controller and steering the needle to targets in gelatin and ex vivo ovine brain tissue. We compare our method's performance against an Extended Kalman Filter, a model-based observer, achieving significantly lower targeting errors.