 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Monocular Vision to Autonomous Action: Guiding Tumor Resection via 3D Reconstruction
Mar 20, 2025Surgical automation requires precise guidance and understanding of the scene. Current methods in the literature rely on bulky depth cameras to create maps of the anatomy, however this does not translate well to space-limited clinical applications. Monocular cameras are small and allow minimally invasive surgeries in tight spaces but additional processing is required to generate 3D scene understanding. We propose a 3D mapping pipeline that uses only RGB images to create segmented point clouds of the target anatomy. To ensure the most precise reconstruction, we compare different structure from motion algorithms' performance on mapping the central airway obstructions, and test the pipeline on a downstream task of tumor resection. In several metrics, including post-procedure tissue model evaluation, our pipeline performs comparably to RGB-D cameras and, in some cases, even surpasses their performance. These promising results demonstrate that automation guidance can be achieved in minimally invasive procedures with monocular cameras. This study is a step toward the complete autonomy of surgical robots.
Safe Start Regions for Medical Steerable Needle Automation
Apr 12, 2024Steerable needles are minimally invasive devices that enable novel medical procedures by following curved paths to avoid critical anatomical obstacles. Planning algorithms can be used to find a steerable needle motion plan to a target. Deployment typically consists of a physician manually inserting the steerable needle into tissue at the motion plan's start pose and handing off control to a robot, which then autonomously steers it to the target along the plan. The handoff between human and robot is critical for procedure success, as even small deviations from the start pose change the steerable needle's workspace and there is no guarantee that the target will still be reachable. We introduce a metric that evaluates the robustness to such start pose deviations. When measuring this robustness to deviations, we consider the tradeoff between being robust to changes in position versus changes in orientation. We evaluate our metric through simulation in an abstract, a liver, and a lung planning scenario. Our evaluation shows that our metric can be combined with different motion planners and that it efficiently determines large, safe start regions.
Accounting for Hysteresis in the Forward Kinematics of Nonlinearly-Routed Tendon-Driven Continuum Robots via a Learned Deep Decoder Network
Apr 04, 2024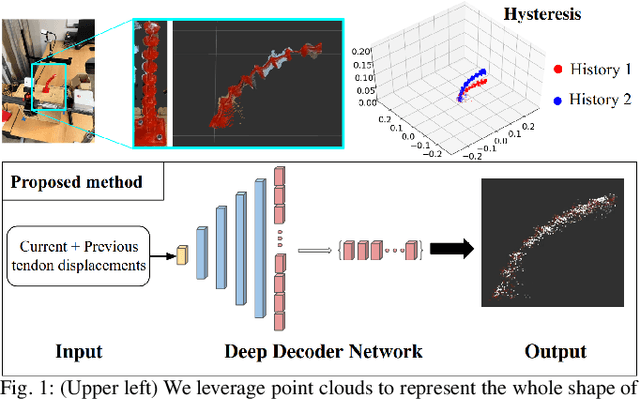
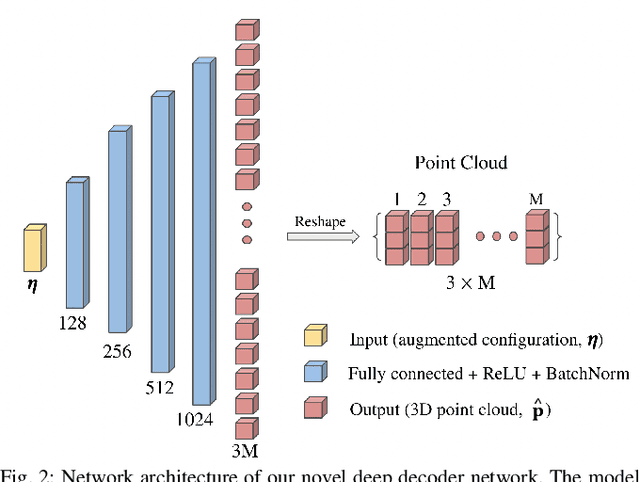
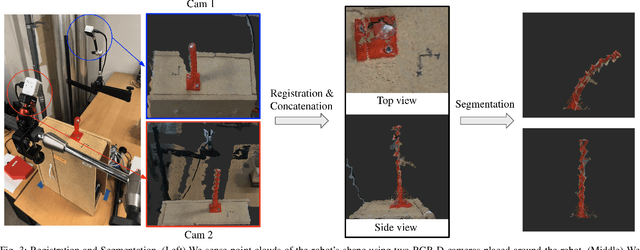
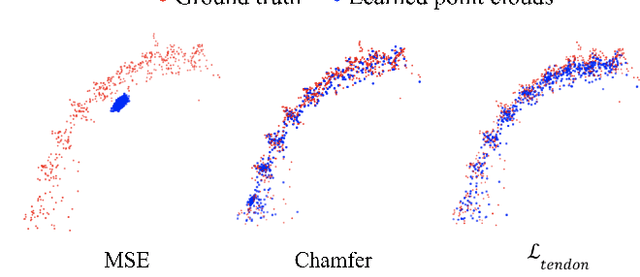
Tendon-driven continuum robots have been gaining popularity in medical applications due to their ability to curve around complex anatomical structures, potentially reducing the invasiveness of surgery. However, accurate modeling is required to plan and control the movements of these flexible robots. Physics-based models have limitations due to unmodeled effects, leading to mismatches between model prediction and actual robot shape. Recently proposed learning-based methods have been shown to overcome some of these limitations but do not account for hysteresis, a significant source of error for these robots. To overcome these challenges, we propose a novel deep decoder neural network that predicts the complete shape of tendon-driven robots using point clouds as the shape representation, conditioned on prior configurations to account for hysteresis. We evaluate our method on a physical tendon-driven robot and show that our network model accurately predicts the robot's shape, significantly outperforming a state-of-the-art physics-based model and a learning-based model that does not account for hysteresis.
Autonomous Medical Needle Steering In Vivo
Nov 04, 2022The use of needles to access sites within organs is fundamental to many interventional medical procedures both for diagnosis and treatment. Safe and accurate navigation of a needle through living tissue to an intra-tissue target is currently often challenging or infeasible due to the presence of anatomical obstacles in the tissue, high levels of uncertainty, and natural tissue motion (e.g., due to breathing). Medical robots capable of automating needle-based procedures in vivo have the potential to overcome these challenges and enable an enhanced level of patient care and safety. In this paper, we show the first medical robot that autonomously navigates a needle inside living tissue around anatomical obstacles to an intra-tissue target. Our system leverages an aiming device and a laser-patterned highly flexible steerable needle, a type of needle capable of maneuvering along curvilinear trajectories to avoid obstacles. The autonomous robot accounts for anatomical obstacles and uncertainty in living tissue/needle interaction with replanning and control and accounts for respiratory motion by defining safe insertion time windows during the breathing cycle. We apply the system to lung biopsy, which is critical in the diagnosis of lung cancer, the leading cause of cancer-related death in the United States. We demonstrate successful performance of our system in multiple in vivo porcine studies and also demonstrate that our approach leveraging autonomous needle steering outperforms a standard manual clinical technique for lung nodule access.
Center of Gravity-based Approach for Modeling Dynamics of Multisection Continuum Arms
Jan 06, 2019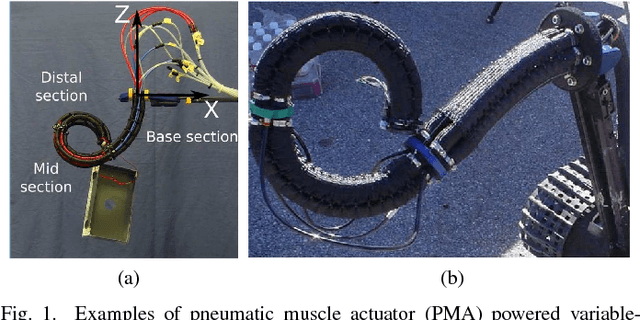
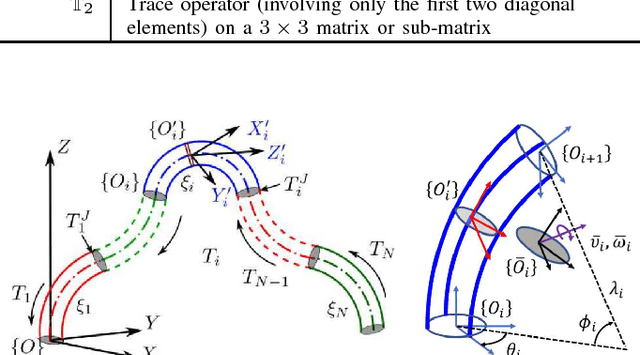
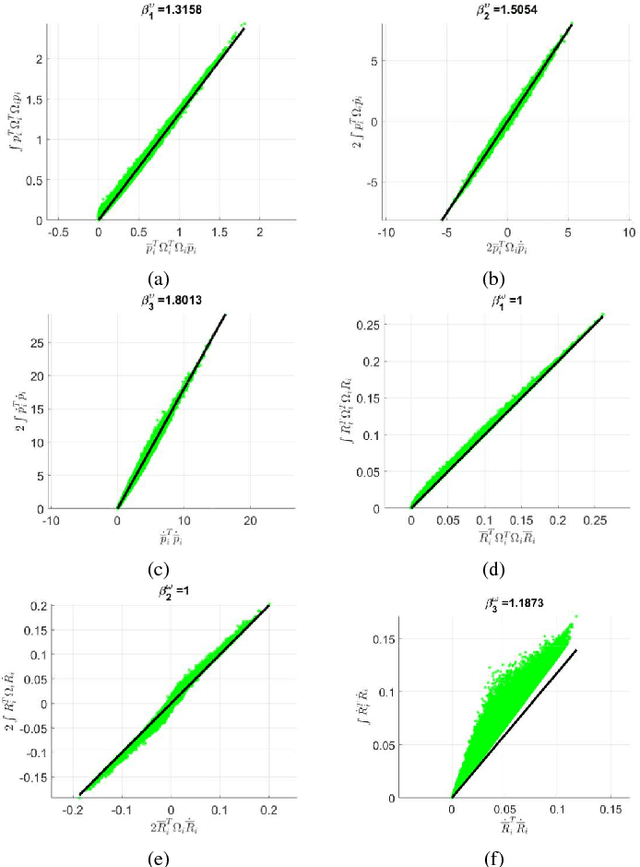
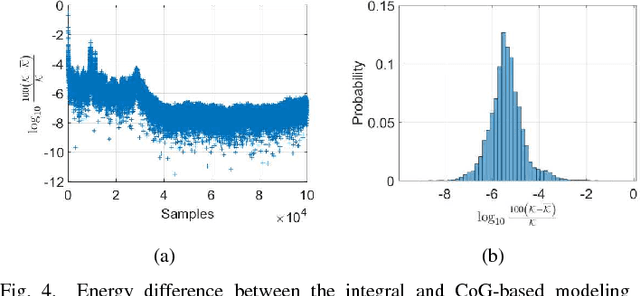
Multisection continuum arms offer complementary characteristics to those of traditional rigid-bodied robots. Inspired by biological appendages, such as elephant trunks and octopus arms, these robots trade rigidity for compliance, accuracy for safety, and therefore exhibit strong potential for applications in human-occupied spaces. Prior work has demonstrated their superiority in operation in congested spaces and manipulation of irregularly-shaped objects. However, they are yet to be widely applied outside laboratory spaces. One key reason is that, due to compliance, they are difficult to control. Sophisticated and numerically efficient dynamic models are a necessity to implement dynamic control. In this paper, we propose a novel, numerically stable, center of gravity-based dynamic model for variable-length multisection continuum arms. The model can accommodate continuum robots having any number of sections with varying physical dimensions. The dynamic algorithm is of O(n2) complexity, runs at 9.5 kHz, simulates 6-8 times faster than real-time for a three-section continuum robot, and therefore is ideally suited for real-time control implementations. The model accuracy is validated numerically against an integral-dynamic model proposed by the authors and experimentally for a three-section, pneumatically actuated variable-length multisection continuum arm. This is the first sub real-time dynamic model based on a smooth continuous deformation model for variable-length multisection continuum arms.