 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Variable Stiffness Soft Robotic Gripper
Oct 22, 2020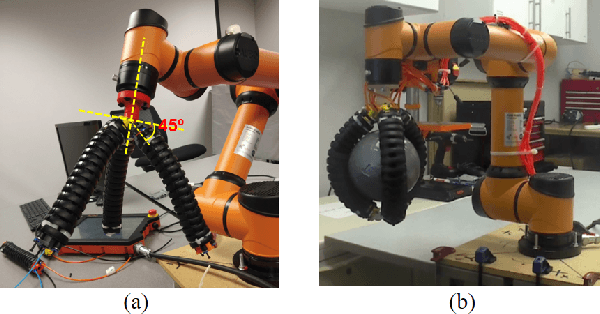
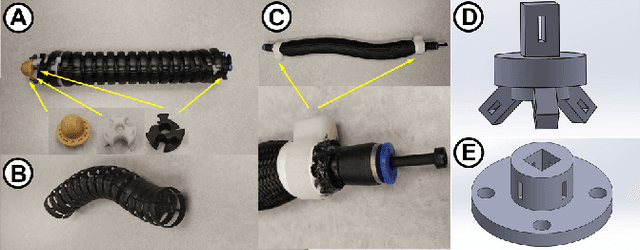
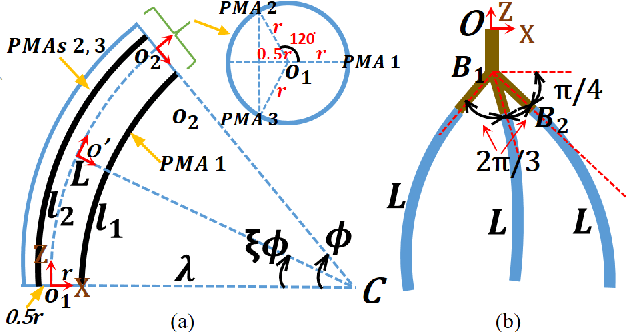
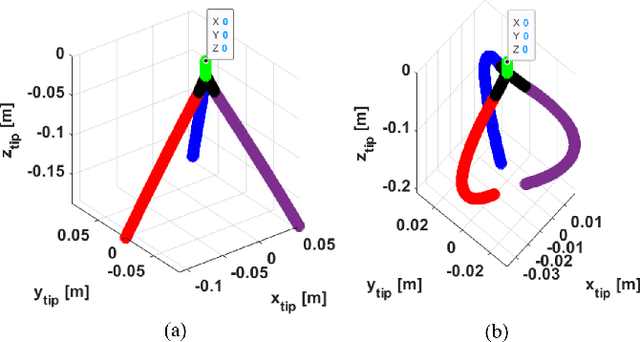
We propose a novel tri-fingered soft robotic gripper with decoupled stiffness and shape control capability for performing adaptive grasping with minimum system complexity. The proposed soft fingers adaptively conform to object shapes facilitating the handling of objects of different types, shapes, and sizes. Each soft gripper finger has an inextensible articulable backbone and is actuated by pneumatic muscles. We derive a kinematic model of the gripper and use an empirical approach to map input pressures to stiffness and bending deformation of fingers. We use these mappings to achieve decoupled stiffness and shape control. We conduct tests to quantify the ability to hold objects as the gripper changes orientation, the ability to maintain the grasping status as the gripper moves, and the amount of force required to release the object from the gripped fingers, respectively. The results validate the proposed gripper's performance and show how stiffness control can improve the grasping quality.
Center of Gravity-based Approach for Modeling Dynamics of Multisection Continuum Arms
Jan 06, 2019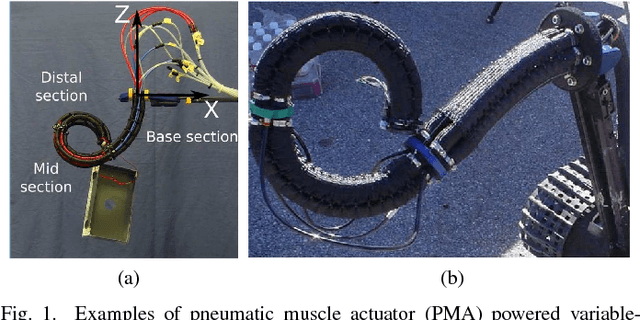
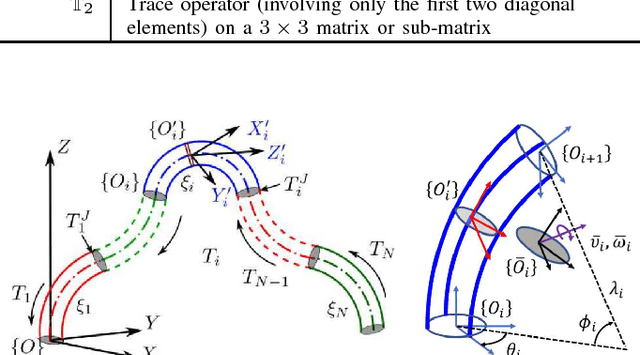
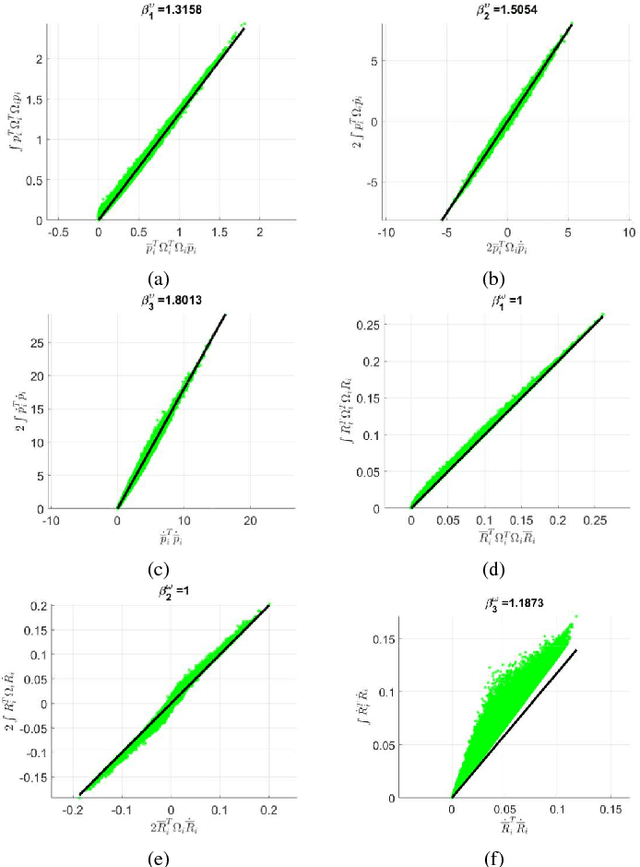
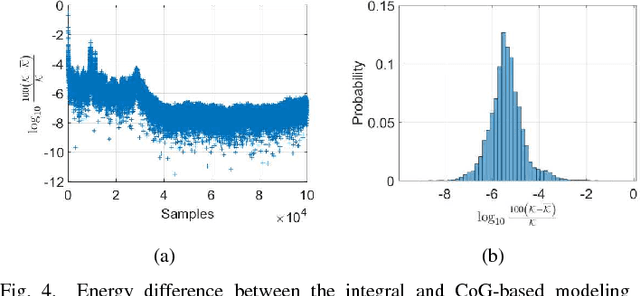
Multisection continuum arms offer complementary characteristics to those of traditional rigid-bodied robots. Inspired by biological appendages, such as elephant trunks and octopus arms, these robots trade rigidity for compliance, accuracy for safety, and therefore exhibit strong potential for applications in human-occupied spaces. Prior work has demonstrated their superiority in operation in congested spaces and manipulation of irregularly-shaped objects. However, they are yet to be widely applied outside laboratory spaces. One key reason is that, due to compliance, they are difficult to control. Sophisticated and numerically efficient dynamic models are a necessity to implement dynamic control. In this paper, we propose a novel, numerically stable, center of gravity-based dynamic model for variable-length multisection continuum arms. The model can accommodate continuum robots having any number of sections with varying physical dimensions. The dynamic algorithm is of O(n2) complexity, runs at 9.5 kHz, simulates 6-8 times faster than real-time for a three-section continuum robot, and therefore is ideally suited for real-time control implementations. The model accuracy is validated numerically against an integral-dynamic model proposed by the authors and experimentally for a three-section, pneumatically actuated variable-length multisection continuum arm. This is the first sub real-time dynamic model based on a smooth continuous deformation model for variable-length multisection continuum arms.
Dynamic Control of Pneumatic Muscle Actuators
Nov 12, 2018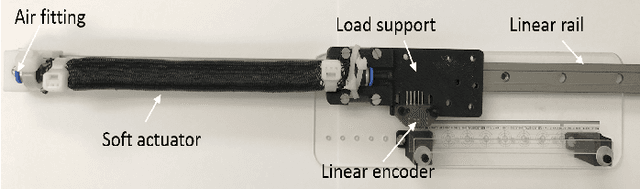

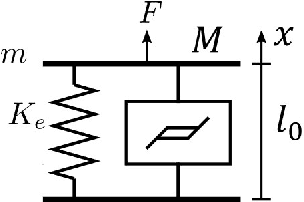

Pneumatic muscle actuators (PMA) are easy-to-fabricate, lightweight, compliant, and have high power-to-weight ratio, thus making them the ideal actuation choice for many soft and continuum robots. But so far, limited work has been carried out in dynamic control of PMAs. One reason is that PMAs are highly hysteretic. Coupled with their high compliance and response lag, PMAs are challenging to control, particularly when subjected to external loads. The hysteresis models proposed to-date rely on many physical and mechanical parameters that are difficult to measure reliably and therefore of limited use for implementing dynamic control. In this work, we employ a Bouc-Wen hysteresis modeling approach to account for the hysteresis of PMAs and use the model for implementing dynamic control. The controller is then compared to PID feedback control for a number of dynamic position tracking tests. The dynamic control based on the Bouc-Wen hysteresis model shows significantly better tracking performance. This work lays the foundation towards implementing dynamic control for PMA-powered high degrees of freedom soft and continuum robots.
A Mobile Robotic Personal Nightstand with Integrated Perceptual Processes
Oct 13, 2013
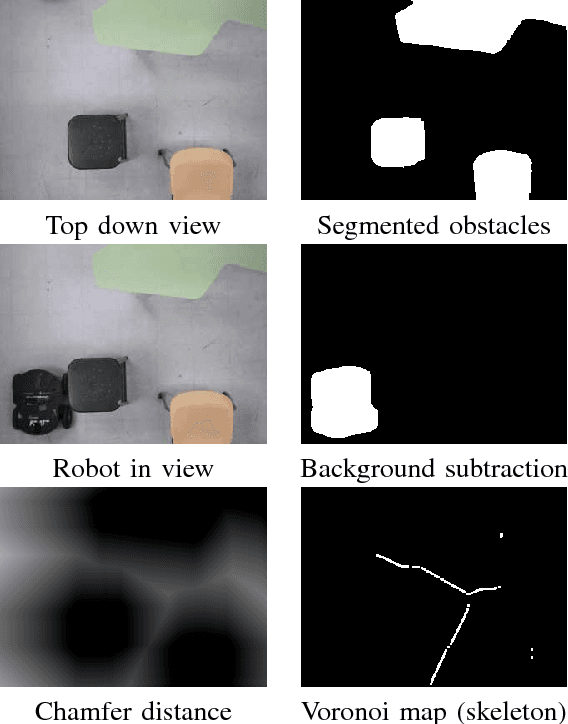
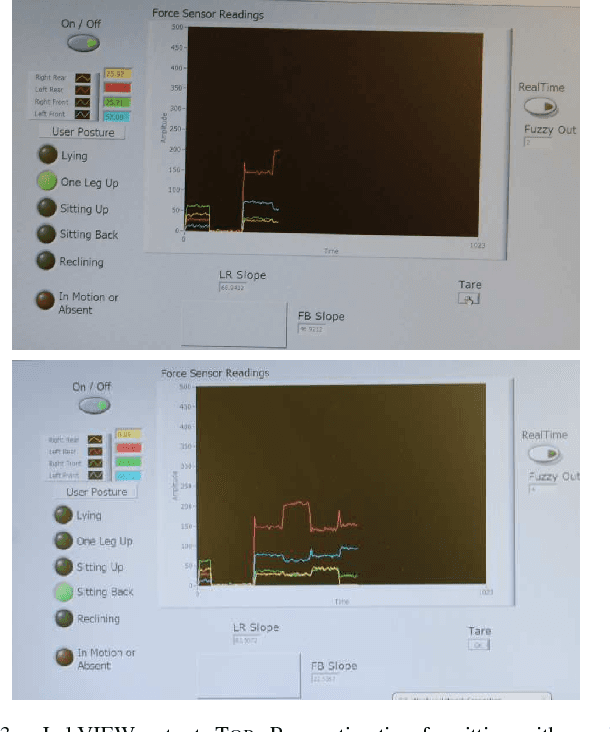
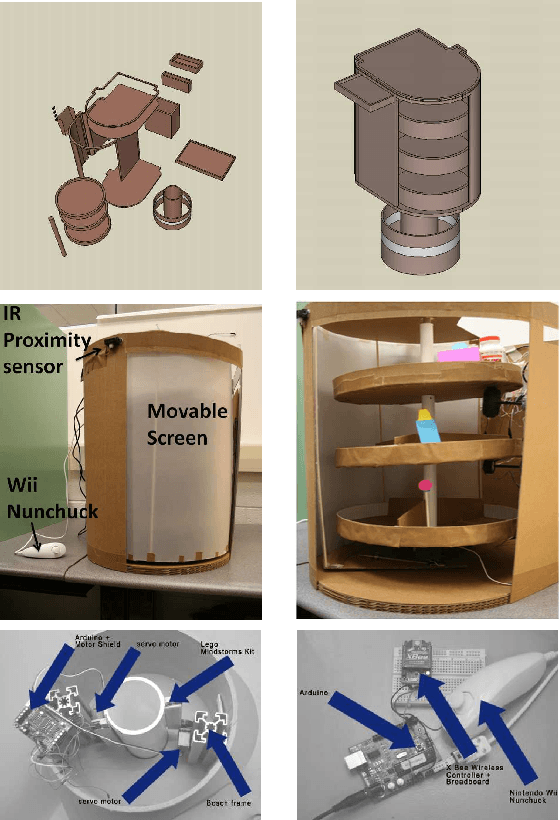
We present an intelligent interactive nightstand mounted on a mobile robot, to aid the elderly in their homes using physical, tactile and visual percepts. We show the integration of three different sensing modalities for controlling the navigation of a robot mounted nightstand within the constrained environment of a general purpose living room housing a single aging individual in need of assistance and monitoring. A camera mounted on the ceiling of the room, gives a top-down view of the obstacles, the person and the nightstand. Pressure sensors mounted beneath the bed-stand of the individual provide physical perception of the person's state. A proximity IR sensor on the nightstand acts as a tactile interface along with a Wii Nunchuck (Nintendo) to control mundane operations on the nightstand. Intelligence from these three modalities are combined to enable path planning for the nightstand to approach the individual. With growing emphasis on assistive technology for the aging individuals who are increasingly electing to stay in their homes, we show how ubiquitous intelligence can be brought inside homes to help monitor and provide care to an individual. Our approach goes one step towards achieving pervasive intelligence by seamlessly integrating different sensors embedded in the fabric of the environment.