 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling and Validation of Soft Robotic Snake Locomotion
Oct 22, 2020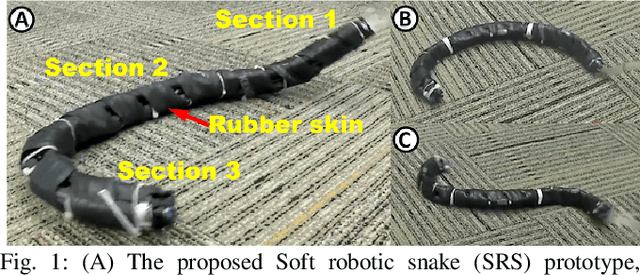
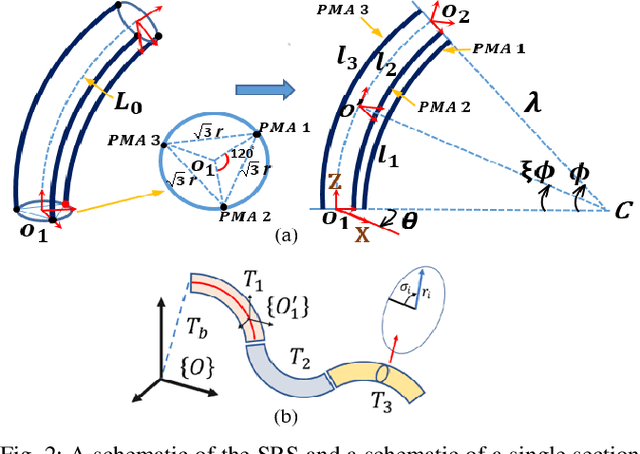
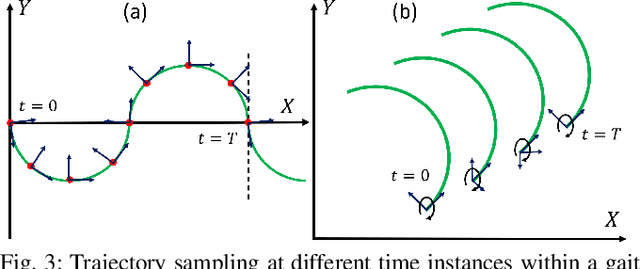
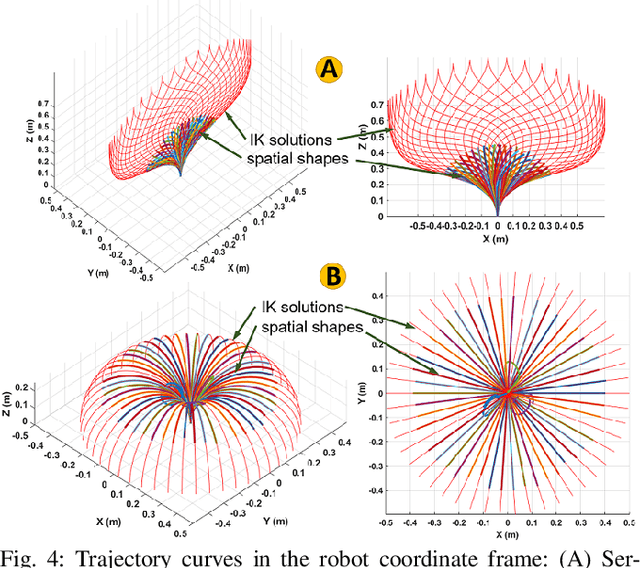
Snakes are a remarkable evolutionary success story. Many snake-inspired robots have been proposed over the years. Soft robotic snakes (SRS) with their continuous and smooth bending capability better mimic their biological counterparts' unique characteristics. Prior SRSs are limited to planar operation with a limited number of planar gaits. We propose a novel SRS with spatial bending and investigate snake locomotion gaits beyond the capabilities of the state-of-the-art systems. We derive a complete floating-base kinematic model of the robot and use the model to derive jointspace trajectories for serpentine and inward/outward rolling locomotion gaits. The locomotion gaits for the proposed SRS are experimentally validated under varying frequency and amplitude of gait cycles. The results qualitatively and quantitatively validate the SRS ability to leverage spatial bending to achieve locomotion gaits not possible with current SRS.
A Novel Variable Stiffness Soft Robotic Gripper
Oct 22, 2020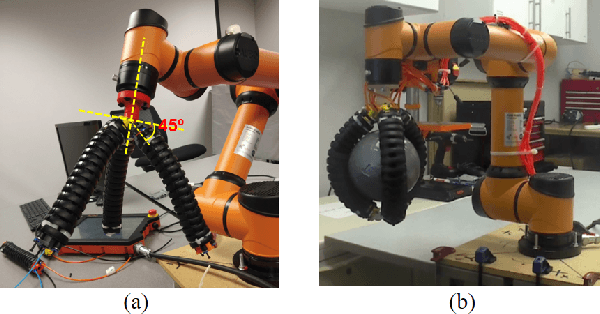
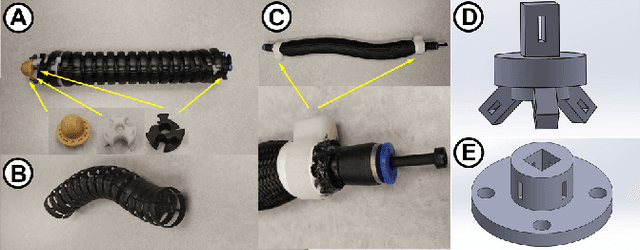
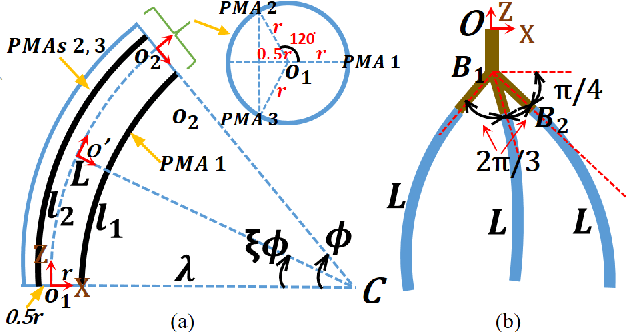
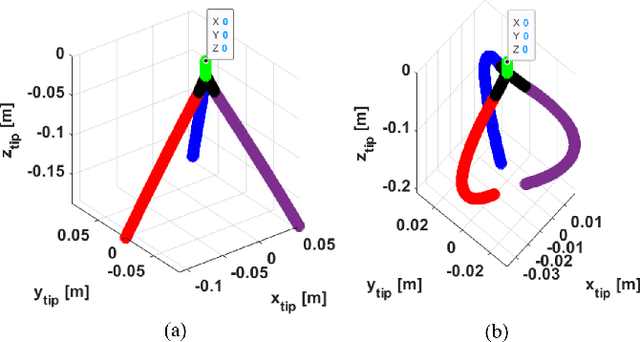
We propose a novel tri-fingered soft robotic gripper with decoupled stiffness and shape control capability for performing adaptive grasping with minimum system complexity. The proposed soft fingers adaptively conform to object shapes facilitating the handling of objects of different types, shapes, and sizes. Each soft gripper finger has an inextensible articulable backbone and is actuated by pneumatic muscles. We derive a kinematic model of the gripper and use an empirical approach to map input pressures to stiffness and bending deformation of fingers. We use these mappings to achieve decoupled stiffness and shape control. We conduct tests to quantify the ability to hold objects as the gripper changes orientation, the ability to maintain the grasping status as the gripper moves, and the amount of force required to release the object from the gripped fingers, respectively. The results validate the proposed gripper's performance and show how stiffness control can improve the grasping quality.