 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen-H-Embodiment: A Large-Scale Dataset for Enabling Foundation Models in Medical Robotics
Apr 22, 2026Autonomous medical robots hold promise to improve patient outcomes, reduce provider workload, democratize access to care, and enable superhuman precision. However, autonomous medical robotics has been limited by a fundamental data problem: existing medical robotic datasets are small, single-embodiment, and rarely shared openly, restricting the development of foundation models that the field needs to advance. We introduce Open-H-Embodiment, the largest open dataset of medical robotic video with synchronized kinematics to date, spanning more than 49 institutions and multiple robotic platforms including the CMR Versius, Intuitive Surgical's da Vinci, da Vinci Research Kit (dVRK), Rob Surgical BiTrack, Virtual Incision's MIRA, Moon Surgical Maestro, and a variety of custom systems, spanning surgical manipulation, robotic ultrasound, and endoscopy procedures. We demonstrate the research enabled by this dataset through two foundation models. GR00T-H is the first open foundation vision-language-action model for medical robotics, which is the only evaluated model to achieve full end-to-end task completion on a structured suturing benchmark (25% of trials vs. 0% for all others) and achieves 64% average success across a 29-step ex vivo suturing sequence. We also train Cosmos-H-Surgical-Simulator, the first action-conditioned world model to enable multi-embodiment surgical simulation from a single checkpoint, spanning nine robotic platforms and supporting in silico policy evaluation and synthetic data generation for the medical domain. These results suggest that open, large-scale medical robot data collection can serve as critical infrastructure for the research community, enabling advances in robot learning, world modeling, and beyond.
ProbeMDE: Uncertainty-Guided Active Proprioception for Monocular Depth Estimation in Surgical Robotics
Dec 17, 2025Monocular depth estimation (MDE) provides a useful tool for robotic perception, but its predictions are often uncertain and inaccurate in challenging environments such as surgical scenes where textureless surfaces, specular reflections, and occlusions are common. To address this, we propose ProbeMDE, a cost-aware active sensing framework that combines RGB images with sparse proprioceptive measurements for MDE. Our approach utilizes an ensemble of MDE models to predict dense depth maps conditioned on both RGB images and on a sparse set of known depth measurements obtained via proprioception, where the robot has touched the environment in a known configuration. We quantify predictive uncertainty via the ensemble's variance and measure the gradient of the uncertainty with respect to candidate measurement locations. To prevent mode collapse while selecting maximally informative locations to propriocept (touch), we leverage Stein Variational Gradient Descent (SVGD) over this gradient map. We validate our method in both simulated and physical experiments on central airway obstruction surgical phantoms. Our results demonstrate that our approach outperforms baseline methods across standard depth estimation metrics, achieving higher accuracy while minimizing the number of required proprioceptive measurements. Project page: https://brittonjordan.github.io/probe_mde/
Early Failure Detection in Autonomous Surgical Soft-Tissue Manipulation via Uncertainty Quantification
Jan 17, 2025Autonomous surgical robots are a promising solution to the increasing demand for surgery amid a shortage of surgeons. Recent work has proposed learning-based approaches for the autonomous manipulation of soft tissue. However, due to variability in tissue geometries and stiffnesses, these methods do not always perform optimally, especially in out-of-distribution settings. We propose, develop, and test the first application of uncertainty quantification to learned surgical soft-tissue manipulation policies as an early identification system for task failures. We analyze two different methods of uncertainty quantification, deep ensembles and Monte Carlo dropout, and find that deep ensembles provide a stronger signal of future task success or failure. We validate our approach using the physical daVinci Research Kit (dVRK) surgical robot to perform physical soft-tissue manipulation. We show that we are able to successfully detect task failure and request human intervention when necessary while still enabling autonomous manipulation when possible. Our learned tissue manipulation policy with uncertainty-based early failure detection achieves a zero-shot sim2real performance improvement of 47.5% over the prior state of the art in learned soft-tissue manipulation. We also show that our method generalizes well to new types of tissue as well as to a bimanual soft tissue manipulation task.
Modeling Kinematic Uncertainty of Tendon-Driven Continuum Robots via Mixture Density Networks
Apr 05, 2024



Tendon-driven continuum robot kinematic models are frequently computationally expensive, inaccurate due to unmodeled effects, or both. In particular, unmodeled effects produce uncertainties that arise during the robot's operation that lead to variability in the resulting geometry. We propose a novel solution to these issues through the development of a Gaussian mixture kinematic model. We train a mixture density network to output a Gaussian mixture model representation of the robot geometry given the current tendon displacements. This model computes a probability distribution that is more representative of the true distribution of geometries at a given configuration than a model that outputs a single geometry, while also reducing the computation time. We demonstrate one use of this model through a trajectory optimization method that explicitly reasons about the workspace uncertainty to minimize the probability of collision.
Accounting for Hysteresis in the Forward Kinematics of Nonlinearly-Routed Tendon-Driven Continuum Robots via a Learned Deep Decoder Network
Apr 04, 2024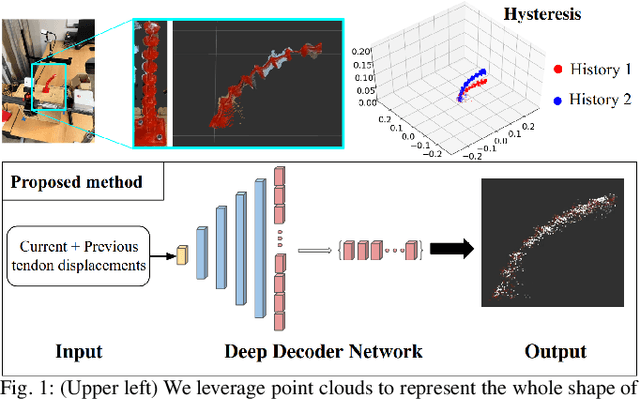
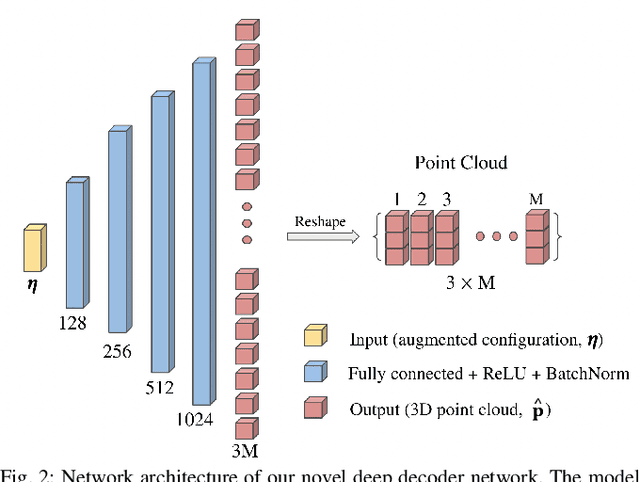
Tendon-driven continuum robots have been gaining popularity in medical applications due to their ability to curve around complex anatomical structures, potentially reducing the invasiveness of surgery. However, accurate modeling is required to plan and control the movements of these flexible robots. Physics-based models have limitations due to unmodeled effects, leading to mismatches between model prediction and actual robot shape. Recently proposed learning-based methods have been shown to overcome some of these limitations but do not account for hysteresis, a significant source of error for these robots. To overcome these challenges, we propose a novel deep decoder neural network that predicts the complete shape of tendon-driven robots using point clouds as the shape representation, conditioned on prior configurations to account for hysteresis. We evaluate our method on a physical tendon-driven robot and show that our network model accurately predicts the robot's shape, significantly outperforming a state-of-the-art physics-based model and a learning-based model that does not account for hysteresis.