 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Supervised Autonomous Resection and Retraction Framework for Transurethral Enucleation of the Prostatic Median Lobe
Nov 11, 2025Concentric tube robots (CTRs) offer dexterous motion at millimeter scales, enabling minimally invasive procedures through natural orifices. This work presents a coordinated model-based resection planner and learning-based retraction network that work together to enable semi-autonomous tissue resection using a dual-arm transurethral concentric tube robot (the Virtuoso). The resection planner operates directly on segmented CT volumes of prostate phantoms, automatically generating tool trajectories for a three-phase median lobe resection workflow: left/median trough resection, right/median trough resection, and median blunt dissection. The retraction network, PushCVAE, trained on surgeon demonstrations, generates retractions according to the procedural phase. The procedure is executed under Level-3 (supervised) autonomy on a prostate phantom composed of hydrogel materials that replicate the mechanical and cutting properties of tissue. As a feasibility study, we demonstrate that our combined autonomous system achieves a 97.1% resection of the targeted volume of the median lobe. Our study establishes a foundation for image-guided autonomy in transurethral robotic surgery and represents a first step toward fully automated minimally-invasive prostate enucleation.
DefFusionNet: Learning Multimodal Goal Shapes for Deformable Object Manipulation via a Diffusion-based Probabilistic Model
Jun 23, 2025Deformable object manipulation is critical to many real-world robotic applications, ranging from surgical robotics and soft material handling in manufacturing to household tasks like laundry folding. At the core of this important robotic field is shape servoing, a task focused on controlling deformable objects into desired shapes. The shape servoing formulation requires the specification of a goal shape. However, most prior works in shape servoing rely on impractical goal shape acquisition methods, such as laborious domain-knowledge engineering or manual manipulation. DefGoalNet previously posed the current state-of-the-art solution to this problem, which learns deformable object goal shapes directly from a small number of human demonstrations. However, it significantly struggles in multi-modal settings, where multiple distinct goal shapes can all lead to successful task completion. As a deterministic model, DefGoalNet collapses these possibilities into a single averaged solution, often resulting in an unusable goal. In this paper, we address this problem by developing DefFusionNet, a novel neural network that leverages the diffusion probabilistic model to learn a distribution over all valid goal shapes rather than predicting a single deterministic outcome. This enables the generation of diverse goal shapes and avoids the averaging artifacts. We demonstrate our method's effectiveness on robotic tasks inspired by both manufacturing and surgical applications, both in simulation and on a physical robot. Our work is the first generative model capable of producing a diverse, multi-modal set of deformable object goals for real-world robotic applications.
From Monocular Vision to Autonomous Action: Guiding Tumor Resection via 3D Reconstruction
Mar 20, 2025Surgical automation requires precise guidance and understanding of the scene. Current methods in the literature rely on bulky depth cameras to create maps of the anatomy, however this does not translate well to space-limited clinical applications. Monocular cameras are small and allow minimally invasive surgeries in tight spaces but additional processing is required to generate 3D scene understanding. We propose a 3D mapping pipeline that uses only RGB images to create segmented point clouds of the target anatomy. To ensure the most precise reconstruction, we compare different structure from motion algorithms' performance on mapping the central airway obstructions, and test the pipeline on a downstream task of tumor resection. In several metrics, including post-procedure tissue model evaluation, our pipeline performs comparably to RGB-D cameras and, in some cases, even surpasses their performance. These promising results demonstrate that automation guidance can be achieved in minimally invasive procedures with monocular cameras. This study is a step toward the complete autonomy of surgical robots.
DefGoalNet: Contextual Goal Learning from Demonstrations For Deformable Object Manipulation
Sep 25, 2023
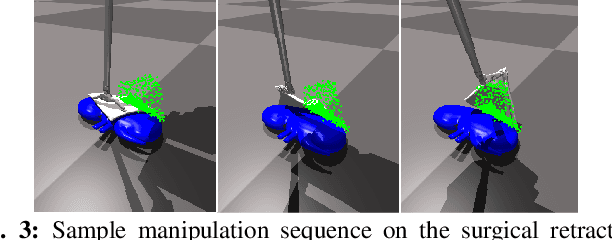
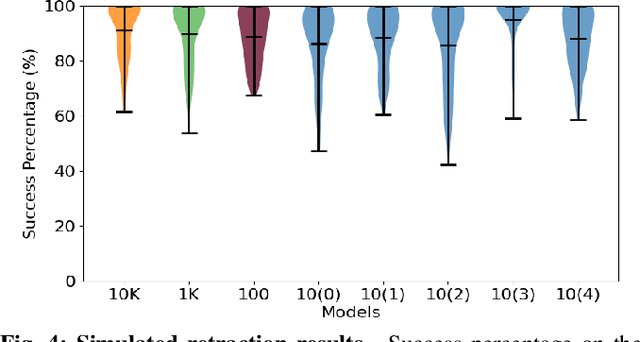

Shape servoing, a robotic task dedicated to controlling objects to desired goal shapes, is a promising approach to deformable object manipulation. An issue arises, however, with the reliance on the specification of a goal shape. This goal has been obtained either by a laborious domain knowledge engineering process or by manually manipulating the object into the desired shape and capturing the goal shape at that specific moment, both of which are impractical in various robotic applications. In this paper, we solve this problem by developing a novel neural network DefGoalNet, which learns deformable object goal shapes directly from a small number of human demonstrations. We demonstrate our method's effectiveness on various robotic tasks, both in simulation and on a physical robot. Notably, in the surgical retraction task, even when trained with as few as 10 demonstrations, our method achieves a median success percentage of nearly 90%. These results mark a substantial advancement in enabling shape servoing methods to bring deformable object manipulation closer to practical, real-world applications.