Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgexVIO: A Range-Visual-Inertial Odometry Framework
Paper and Code
Oct 13, 2020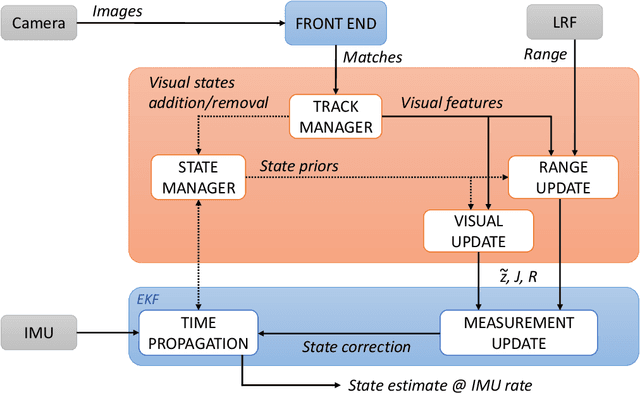
xVIO is a range-visual-inertial odometry algorithm implemented at JPL. It has been demonstrated with closed-loop controls on-board unmanned rotorcraft equipped with off-the-shelf embedded computers and sensors. It can operate at daytime with visible-spectrum cameras, or at night time using thermal infrared cameras. This report is a complete technical description of xVIO. It includes an overview of the system architecture, the implementation of the navigation filter, along with the derivations of the Jacobian matrices which are not already published in the literature.
View paper on