 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModular Meshed Ultra-Wideband Aided Inertial Navigation with Robust Anchor Calibration
Aug 26, 2024



This paper introduces a generic filter-based state estimation framework that supports two state-decoupling strategies based on cross-covariance factorization. These strategies reduce the computational complexity and inherently support true modularity -- a perquisite for handling and processing meshed range measurements among a time-varying set of devices. In order to utilize these measurements in the estimation framework, positions of newly detected stationary devices (anchors) and the pairwise biases between the ranging devices are required. In this work an autonomous calibration procedure for new anchors is presented, that utilizes range measurements from multiple tags as well as already known anchors. To improve the robustness, an outlier rejection method is introduced. After the calibration is performed, the sensor fusion framework obtains initial beliefs of the anchor positions and dictionaries of pairwise biases, in order to fuse range measurements obtained from new anchors tightly-coupled. The effectiveness of the filter and calibration framework has been validated through evaluations on a recorded dataset and real-world experiments.
Scale up to infinity: the UWB Indoor Global Positioning System
Dec 03, 2021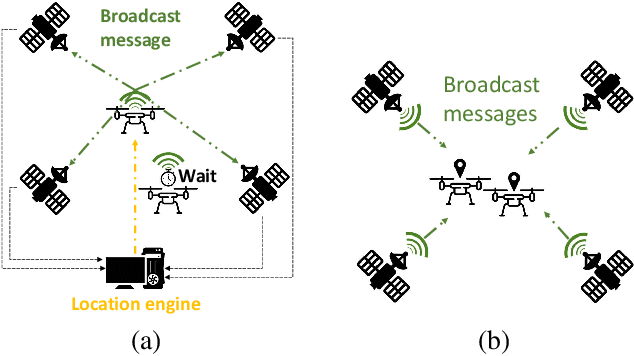
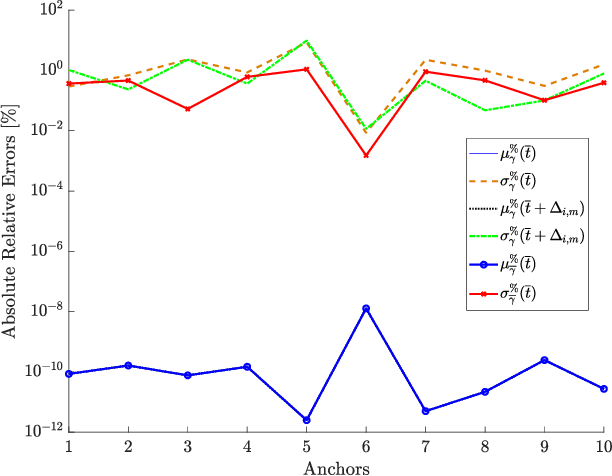
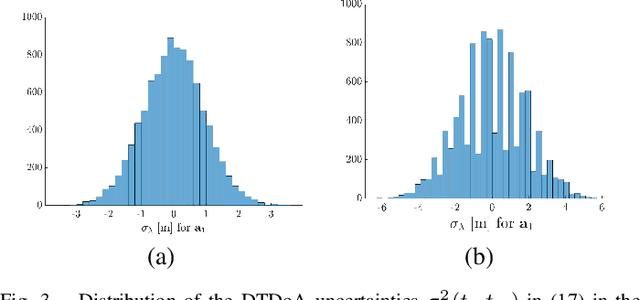
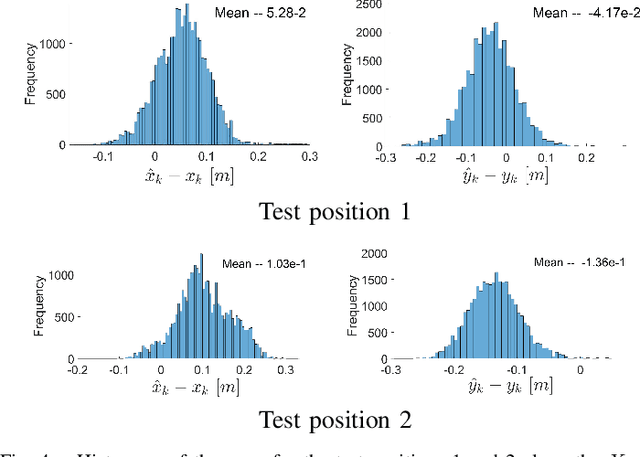
Determining assets position with high accuracy and scalability is one of the most investigated technology on the market. The accuracy provided by satellites-based positioning systems (i.e., GLONASS or Galileo) is not always sufficient when a decimeter-level accuracy is required or when there is the need of localising entities that operate inside indoor environments. Scalability is also a recurrent problem when dealing with indoor positioning systems. This paper presents an innovative UWB Indoor GPS-Like local positioning system able to tracks any number of assets without decreasing measurements update rate. To increase the system's accuracy the mathematical model and the sources of uncertainties are investigated. Results highlight how the proposed implementation provides positioning information with an absolute maximum error below 20 cm. Scalability is also resolved thanks to DTDoA transmission mechanisms not requiring an active role from the asset to be tracked.
On-line Optimal Ranging Sensor Deployment for Robotic Exploration
Oct 17, 2021



Navigation in an unknown environment without any preexisting positioning infrastructure has always been hard for mobile robots. This paper presents a self-deployable ultra wideband UWB infrastructure by mobile agents, that permits a dynamic placement and runtime extension of UWB anchors infrastructure while the robot explores the new environment. We provide a detailed analysis of the uncertainty of the positioning system while the UWB infrastructure grows. Moreover, we developed a genetic algorithm that minimizes the deployment of new anchors, saving energy and resources on the mobile robot and maximizing the time of the mission. Although the presented approach is general for any class of mobile system, we run simulations and experiments with indoor drones. Results demonstrate that maximum positioning uncertainty is always controlled under the user's threshold, using the Geometric Dilution of Precision (GDoP).