 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Initialization of Unknown Anchors for UWB-aided Navigation
Jun 18, 2025This paper presents a framework for the real-time initialization of unknown Ultra-Wideband (UWB) anchors in UWB-aided navigation systems. The method is designed for localization solutions where UWB modules act as supplementary sensors. Our approach enables the automatic detection and calibration of previously unknown anchors during operation, removing the need for manual setup. By combining an online Positional Dilution of Precision (PDOP) estimation, a lightweight outlier detection method, and an adaptive robust kernel for non-linear optimization, our approach significantly improves robustness and suitability for real-world applications compared to state-of-the-art. In particular, we show that our metric which triggers an initialization decision is more conservative than current ones commonly based on initial linear or non-linear initialization guesses. This allows for better initialization geometry and subsequently lower initialization errors. We demonstrate the proposed approach on two different mobile robots: an autonomous forklift and a quadcopter equipped with a UWB-aided Visual-Inertial Odometry (VIO) framework. The results highlight the effectiveness of the proposed method with robust initialization and low positioning error. We open-source our code in a C++ library including a ROS wrapper.
Modular Meshed Ultra-Wideband Aided Inertial Navigation with Robust Anchor Calibration
Aug 26, 2024



This paper introduces a generic filter-based state estimation framework that supports two state-decoupling strategies based on cross-covariance factorization. These strategies reduce the computational complexity and inherently support true modularity -- a perquisite for handling and processing meshed range measurements among a time-varying set of devices. In order to utilize these measurements in the estimation framework, positions of newly detected stationary devices (anchors) and the pairwise biases between the ranging devices are required. In this work an autonomous calibration procedure for new anchors is presented, that utilizes range measurements from multiple tags as well as already known anchors. To improve the robustness, an outlier rejection method is introduced. After the calibration is performed, the sensor fusion framework obtains initial beliefs of the anchor positions and dictionaries of pairwise biases, in order to fuse range measurements obtained from new anchors tightly-coupled. The effectiveness of the filter and calibration framework has been validated through evaluations on a recorded dataset and real-world experiments.
Recursive Distributed Collaborative Aided Inertial Navigation
Aug 22, 2024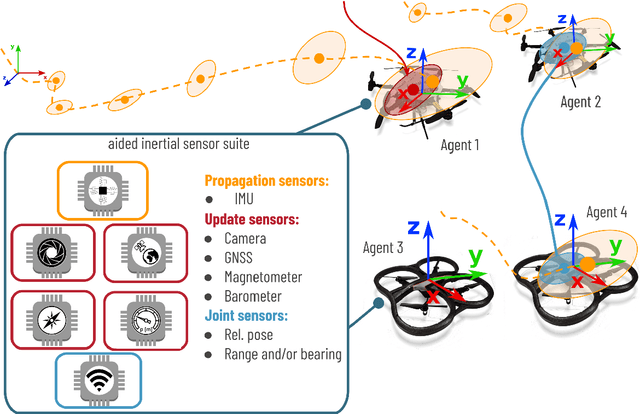
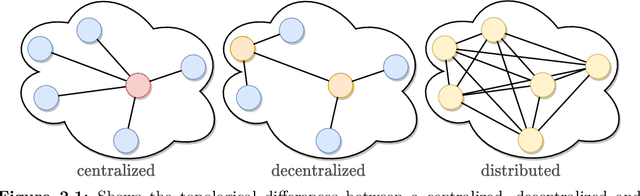
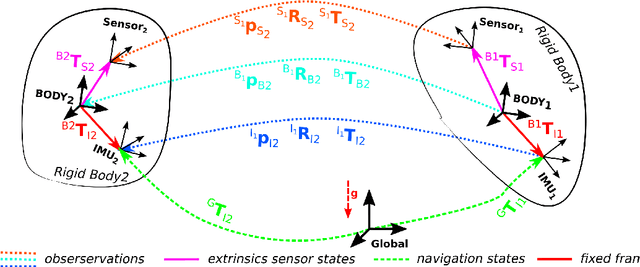
In this dissertation, we investigate the issue of robust localization in swarms of heterogeneous mobile agents with multiple and time-varying sensing modalities. Our focus is the development of filter-based and decoupled estimators under the assumption that agents possess communication and processing capabilities. Based on the findings from Distributed Collaborative State Estimation and modular sensor fusion, we propose a novel Kalman filter decoupling paradigm, which is termed Isolated Kalman Filtering (IKF). This paradigm is formally discussed and the treatment of delayed measurement is studied. The impact of approximation made was investigated on different observation graphs and the filter credibility was evaluated on a linear system in a Monte Carlo simulation. Finally, we propose a multi-agent modular sensor fusion approach based on the IKF paradigm, in order to cooperatively estimate the global state of a multi-agent system in a distributed way and fuse information provided by different on-board sensors in a computationally efficient way. As a consequence, this approach can be performed distributed among agents, while (i) communication between agents is only required at the moment of inter-agent joint observations, (ii) one agent acts as interim master to process state corrections isolated, (iii) agents can be added and removed from the swarm, (iv) each agent's full state can vary during mission (each local sensor suite can be truly modular), and (v) delayed and multi-rate sensor updates are supported. Extensive evaluation on realistic simulated and real-world data sets show that the proposed Isolated Kalman Filtering (IKF) paradigm, is applicable for both, truly modular single agent estimation and distributed collaborative multi-agent estimation problems.