 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Priors of Human Motion With Vision Transformers
Jan 30, 2025



A clear understanding of where humans move in a scenario, their usual paths and speeds, and where they stop, is very important for different applications, such as mobility studies in urban areas or robot navigation tasks within human-populated environments. We propose in this article, a neural architecture based on Vision Transformers (ViTs) to provide this information. This solution can arguably capture spatial correlations more effectively than Convolutional Neural Networks (CNNs). In the paper, we describe the methodology and proposed neural architecture and show the experiments' results with a standard dataset. We show that the proposed ViT architecture improves the metrics compared to a method based on a CNN.
Socially-Aware Opinion-Based Navigation with Oval Limit Cycles
Nov 07, 2024
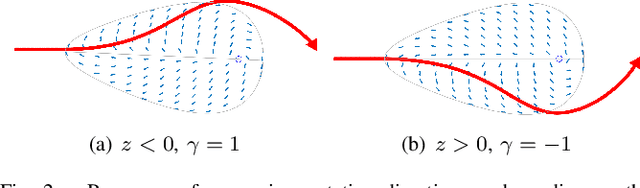
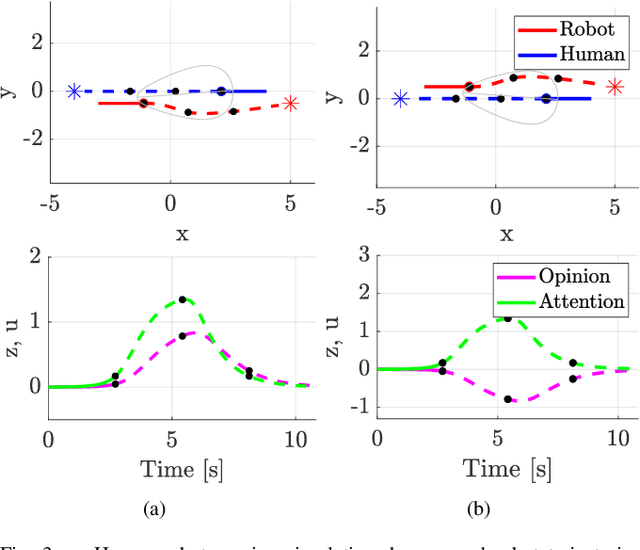
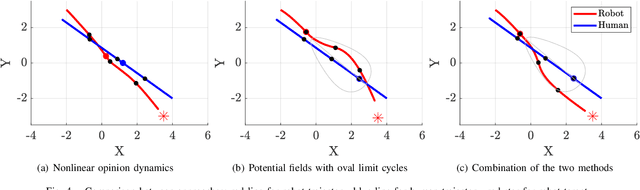
When humans move in a shared space, they choose navigation strategies that preserve their mutual safety. At the same time, each human seeks to minimise the number of modifications to her/his path. In order to achieve this result, humans use unwritten rules and reach a consensus on their decisions about the motion direction by exchanging non-verbal messages. They then implement their choice in a mutually acceptable way. Socially-aware navigation denotes a research effort aimed at replicating this logic inside robots. Existing results focus either on how robots can participate in negotiations with humans, or on how they can move in a socially acceptable way. We propose a holistic approach in which the two aspects are jointly considered. Specifically, we show that by combining opinion dynamics (to reach a consensus) with vortex fields (to generate socially acceptable trajectories), the result outperforms the application of the two techniques in isolation.
Humanising robot-assisted navigation
Oct 17, 2023Robot-assisted navigation is a perfect example of a class of applications requiring flexible control approaches. When the human is reliable, the robot should concede space to their initiative. When the human makes inappropriate choices the robot controller should kick-in guiding them towards safer paths. Shared authority control is a way to achieve this behaviour by deciding online how much of the authority should be given to the human and how much should be retained by the robot. An open problem is how to evaluate the appropriateness of the human's choices. One possible way is to consider the deviation from an ideal path computed by the robot. This choice is certainly safe and efficient, but it emphasises the importance of the robot's decision and relegates the human to a secondary role. In this paper, we propose a different paradigm: a human's behaviour is correct if, at every time, it bears a close resemblance to what other humans do in similar situations. This idea is implemented through the combination of machine learning and adaptive control. The map of the environment is decomposed into a grid. In each cell, we classify the possible motions that the human executes. We use a neural network classifier to classify the current motion, and the probability score is used as a hyperparameter in the control to vary the amount of intervention. The experiments collected for the paper show the feasibility of the idea. A qualitative evaluation, done by surveying the users after they have tested the robot, shows that the participants preferred our control method over a state-of-the-art visco-elastic control.