 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeALPINE: a climbing robot for operations in mountain environments
Paper and Code
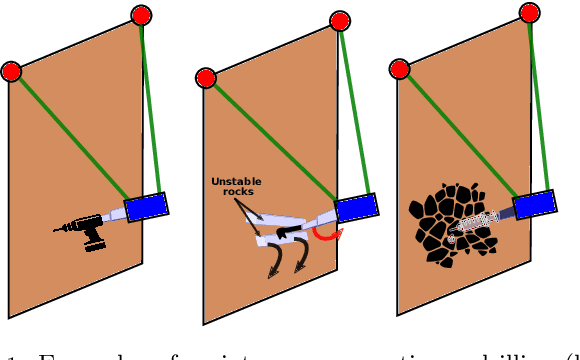

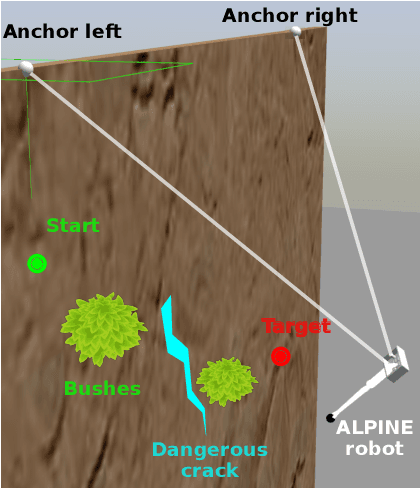

Mountain slopes are perfect examples of harsh environments in which humans are required to perform difficult and dangerous operations such as removing unstable boulders, dangerous vegetation or deploying safety nets. A good replacement for human intervention can be offered by climbing robots. The different solutions existing in the literature are not up to the task for the difficulty of the requirements (navigation, heavy payloads, flexibility in the execution of the tasks). In this paper, we propose a robotic platform that can fill this gap. Our solution is based on a robot that hangs on ropes, and uses a retractable leg to jump away from the mountain walls. Our package of mechanical solutions, along with the algorithms developed for motion planning and control, delivers swift navigation on irregular and steep slopes, the possibility to overcome or travel around significant natural barriers, and the ability to carry heavy payloads and execute complex tasks. In the paper, we give a full account of our main design and algorithmic choices and show the feasibility of the solution through a large number of physically simulated scenarios.