 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Anatomy-Aware Shared Control Approach for Assisted Teleoperation of Lung Ultrasound Examinations
Sep 25, 2024



The introduction of artificial intelligence and robotics in telehealth is enabling personalised treatment and supporting teleoperated procedures such as lung ultrasound, which has gained attention during the COVID-19 pandemic. Although fully autonomous systems face challenges due to anatomical variability, teleoperated systems appear to be more practical in current healthcare settings. This paper presents an anatomy-aware control framework for teleoperated lung ultrasound. Using biomechanically accurate 3D models such as SMPL and SKEL, the system provides a real-time visual feedback and applies virtual constraints to assist in precise probe placement tasks. Evaluations on five subjects show the accuracy of the biomechanical models and the efficiency of the system in improving probe placement and reducing procedure time compared to traditional teleoperation. The results demonstrate that the proposed framework enhances the physician's capabilities in executing remote lung ultrasound examinations, towards more objective and repeatable acquisitions.
Towards Robotised Palpation for Cancer Detection through Online Tissue Viscoelastic Characterisation with a Collaborative Robotic Arm
Apr 15, 2024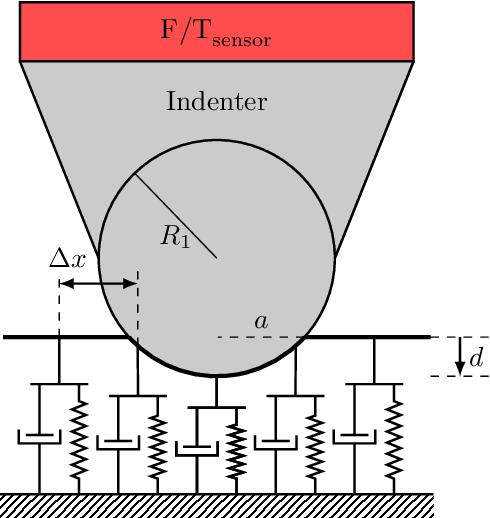
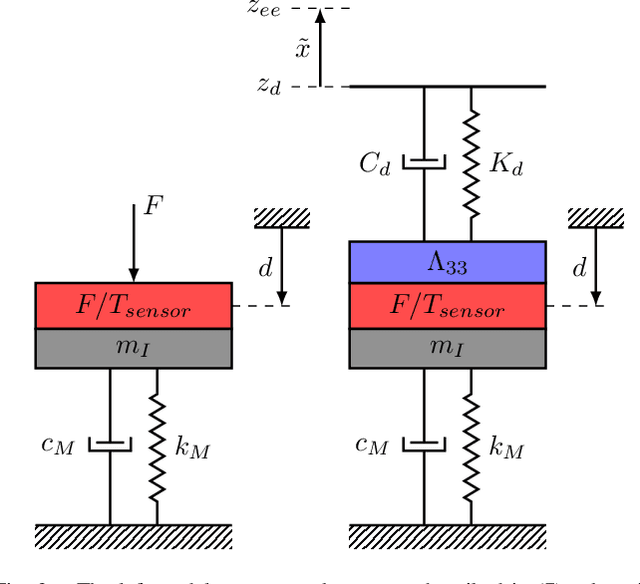
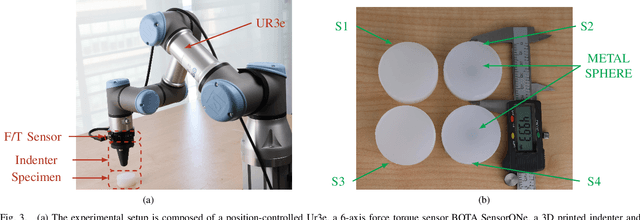
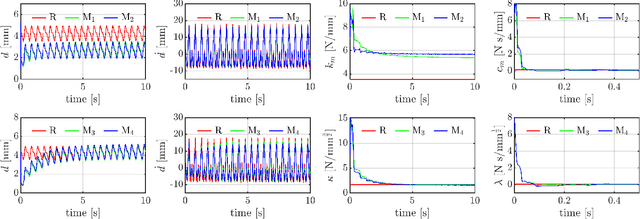
This paper introduces a new method for estimating the penetration of the end effector and the parameters of a soft body using a collaborative robotic arm. This is possible using the dimensionality reduction method that simplifies the Hunt-Crossley model. The parameters can be found without a force sensor thanks to the information of the robotic arm controller. To achieve an online estimation, an extended Kalman filter is employed, which embeds the contact dynamic model. The algorithm is tested with various types of silicone, including samples with hard intrusions to simulate cancerous cells within a soft tissue. The results indicate that this technique can accurately determine the parameters and estimate the penetration of the end effector into the soft body. These promising preliminary results demonstrate the potential for robots to serve as an effective tool for early-stage cancer diagnostics.
Elasticity Measurements of Expanded Foams using a Collaborative Robotic Arm
Dec 15, 2023Medical applications of robots are increasingly popular to objectivise and speed up the execution of several types of diagnostic and therapeutic interventions. Particularly important is a class of diagnostic activities that require physical contact between the robotic tool and the human body, such as palpation examinations and ultrasound scans. The practical application of these techniques can greatly benefit from an accurate estimation of the biomechanical properties of the patient's tissues. In this paper, we evaluate the accuracy and precision of a robotic device used for medical purposes in estimating the elastic parameters of different materials. The measurements are evaluated against a ground truth consisting of a set of expanded foam specimens with different elasticity that are characterised using a high-precision device. The experimental results in terms of precision are comparable with the ground truth and suggest future ambitious developments.
A Passive Variable Impedance Control Strategy with Viscoelastic Parameters Estimation of Soft Tissues for Safe Ultrasonography
Sep 26, 2023



In the context of telehealth, robotic approaches have proven a valuable solution to in-person visits in remote areas, with decreased costs for patients and infection risks. In particular, in ultrasonography, robots have the potential to reproduce the skills required to acquire high-quality images while reducing the sonographer's physical efforts. In this paper, we address the control of the interaction of the probe with the patient's body, a critical aspect of ensuring safe and effective ultrasonography. We introduce a novel approach based on variable impedance control, allowing real-time optimisation of a compliant controller parameters during ultrasound procedures. This optimisation is formulated as a quadratic programming problem and incorporates physical constraints derived from viscoelastic parameter estimations. Safety and passivity constraints, including an energy tank, are also integrated to minimise potential risks during human-robot interaction. The proposed method's efficacy is demonstrated through experiments on a patient dummy torso, highlighting its potential for achieving safe behaviour and accurate force control during ultrasound procedures, even in cases of contact loss.