 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeManipulate-to-Navigate: Reinforcement Learning with Visual Affordances and Manipulability Priors
Aug 18, 2025



Mobile manipulation in dynamic environments is challenging due to movable obstacles blocking the robot's path. Traditional methods, which treat navigation and manipulation as separate tasks, often fail in such 'manipulate-to-navigate' scenarios, as obstacles must be removed before navigation. In these cases, active interaction with the environment is required to clear obstacles while ensuring sufficient space for movement. To address the manipulate-to-navigate problem, we propose a reinforcement learning-based approach for learning manipulation actions that facilitate subsequent navigation. Our method combines manipulability priors to focus the robot on high manipulability body positions with affordance maps for selecting high-quality manipulation actions. By focusing on feasible and meaningful actions, our approach reduces unnecessary exploration and allows the robot to learn manipulation strategies more effectively. We present two new manipulate-to-navigate simulation tasks called Reach and Door with the Boston Dynamics Spot robot. The first task tests whether the robot can select a good hand position in the target area such that the robot base can move effectively forward while keeping the end effector position fixed. The second task requires the robot to move a door aside in order to clear the navigation path. Both of these tasks need first manipulation and then navigating the base forward. Results show that our method allows a robot to effectively interact with and traverse dynamic environments. Finally, we transfer the learned policy to a real Boston Dynamics Spot robot, which successfully performs the Reach task.
MoDeSuite: Robot Learning Task Suite for Benchmarking Mobile Manipulation with Deformable Objects
Jul 29, 2025Mobile manipulation is a critical capability for robots operating in diverse, real-world environments. However, manipulating deformable objects and materials remains a major challenge for existing robot learning algorithms. While various benchmarks have been proposed to evaluate manipulation strategies with rigid objects, there is still a notable lack of standardized benchmarks that address mobile manipulation tasks involving deformable objects. To address this gap, we introduce MoDeSuite, the first Mobile Manipulation Deformable Object task suite, designed specifically for robot learning. MoDeSuite consists of eight distinct mobile manipulation tasks covering both elastic objects and deformable objects, each presenting a unique challenge inspired by real-world robot applications. Success in these tasks requires effective collaboration between the robot's base and manipulator, as well as the ability to exploit the deformability of the objects. To evaluate and demonstrate the use of the proposed benchmark, we train two state-of-the-art reinforcement learning algorithms and two imitation learning algorithms, highlighting the difficulties encountered and showing their performance in simulation. Furthermore, we demonstrate the practical relevance of the suite by deploying the trained policies directly into the real world with the Spot robot, showcasing the potential for sim-to-real transfer. We expect that MoDeSuite will open a novel research domain in mobile manipulation involving deformable objects. Find more details, code, and videos at https://sites.google.com/view/modesuite/home.
IRS: Instance-Level 3D Scene Graphs via Room Prior Guided LiDAR-Camera Fusion
Jun 07, 2025Indoor scene understanding remains a fundamental challenge in robotics, with direct implications for downstream tasks such as navigation and manipulation. Traditional approaches often rely on closed-set recognition or loop closure, limiting their adaptability in open-world environments. With the advent of visual foundation models (VFMs), open-vocabulary recognition and natural language querying have become feasible, unlocking new possibilities for 3D scene graph construction. In this paper, we propose a robust and efficient framework for instance-level 3D scene graph construction via LiDAR-camera fusion. Leveraging LiDAR's wide field of view (FOV) and long-range sensing capabilities, we rapidly acquire room-level geometric priors. Multi-level VFMs are employed to improve the accuracy and consistency of semantic extraction. During instance fusion, room-based segmentation enables parallel processing, while the integration of geometric and semantic cues significantly enhances fusion accuracy and robustness. Compared to state-of-the-art methods, our approach achieves up to an order-of-magnitude improvement in construction speed while maintaining high semantic precision. Extensive experiments in both simulated and real-world environments validate the effectiveness of our approach. We further demonstrate its practical value through a language-guided semantic navigation task, highlighting its potential for real-world robotic applications.
Symbolically-Guided Visual Plan Inference from Uncurated Video Data
May 13, 2025Visual planning, by offering a sequence of intermediate visual subgoals to a goal-conditioned low-level policy, achieves promising performance on long-horizon manipulation tasks. To obtain the subgoals, existing methods typically resort to video generation models but suffer from model hallucination and computational cost. We present Vis2Plan, an efficient, explainable and white-box visual planning framework powered by symbolic guidance. From raw, unlabeled play data, Vis2Plan harnesses vision foundation models to automatically extract a compact set of task symbols, which allows building a high-level symbolic transition graph for multi-goal, multi-stage planning. At test time, given a desired task goal, our planner conducts planning at the symbolic level and assembles a sequence of physically consistent intermediate sub-goal images grounded by the underlying symbolic representation. Our Vis2Plan outperforms strong diffusion video generation-based visual planners by delivering 53\% higher aggregate success rate in real robot settings while generating visual plans 35$\times$ faster. The results indicate that Vis2Plan is able to generate physically consistent image goals while offering fully inspectable reasoning steps.
Predictor-Based Time Delay Control of A Hex-Jet Unmanned Aerial Vehicle
Mar 12, 2025Turbojet-powered VTOL UAVs have garnered increased attention in heavy-load transport and emergency services, due to their superior power density and thrust-to-weight ratio compared to existing electronic propulsion systems. The main challenge with jet-powered UAVs lies in the complexity of thrust vectoring mechanical systems, which aim to mitigate the slow dynamics of the turbojet. In this letter, we introduce a novel turbojet-powered UAV platform named Hex-Jet. Our concept integrates thrust vectoring and differential thrust for comprehensive attitude control. This approach notably simplifies the thrust vectoring mechanism. We utilize a predictor-based time delay control method based on the frequency domain model in our Hex-Jet controller design to mitigate the delay in roll attitude control caused by turbojet dynamics. Our comparative studies provide valuable insights for the UAV community, and flight tests on the scaled prototype demonstrate the successful implementation and verification of the proposed predictor-based time delay control technique.
DeMoBot: Deformable Mobile Manipulation with Vision-based Sub-goal Retrieval
Aug 28, 2024

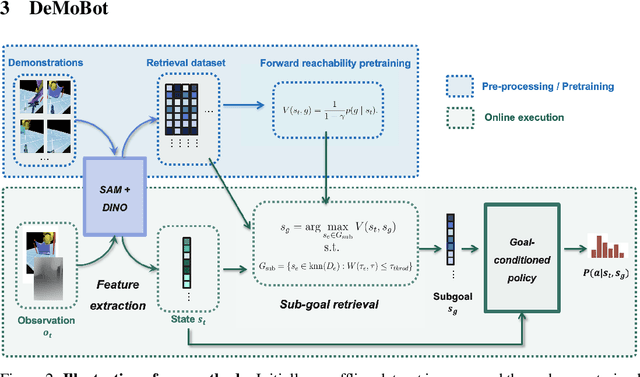
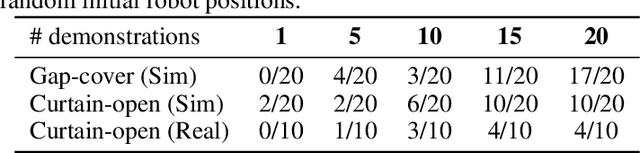
Imitation learning (IL) algorithms typically distill experience into parametric behavior policies to mimic expert demonstrations. Despite their effectiveness, previous methods often struggle with data efficiency and accurately aligning the current state with expert demonstrations, especially in deformable mobile manipulation tasks characterized by partial observations and dynamic object deformations. In this paper, we introduce \textbf{DeMoBot}, a novel IL approach that directly retrieves observations from demonstrations to guide robots in \textbf{De}formable \textbf{Mo}bile manipulation tasks. DeMoBot utilizes vision foundation models to identify relevant expert data based on visual similarity and matches the current trajectory with demonstrated trajectories using trajectory similarity and forward reachability constraints to select suitable sub-goals. Once a goal is determined, a motion generation policy will guide the robot to the next state until the task is completed. We evaluated DeMoBot using a Spot robot in several simulated and real-world settings, demonstrating its effectiveness and generalizability. With only 20 demonstrations, DeMoBot significantly outperforms the baselines, reaching a 50\% success rate in curtain opening and 85\% in gap covering in simulation.