 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlyAware: Inertia-Aware Aerial Manipulation via Vision-Based Estimation and Post-Grasp Adaptation
Jan 30, 2026Aerial manipulators (AMs) are gaining increasing attention in automated transportation and emergency services due to their superior dexterity compared to conventional multirotor drones. However, their practical deployment is challenged by the complexity of time-varying inertial parameters, which are highly sensitive to payload variations and manipulator configurations. Inspired by human strategies for interacting with unknown objects, this letter presents a novel onboard framework for robust aerial manipulation. The proposed system integrates a vision-based pre-grasp inertia estimation module with a post-grasp adaptation mechanism, enabling real-time estimation and adaptation of inertial dynamics. For control, we develop an inertia-aware adaptive control strategy based on gain scheduling, and assess its robustness via frequency-domain system identification. Our study provides new insights into post-grasp control for AMs, and real-world experiments validate the effectiveness and feasibility of the proposed framework.
Design and Implementation of a High-Precision Wind-Estimation UAV with Onboard Sensors
Dec 11, 2025Accurate real-time wind vector estimation is essential for enhancing the safety, navigation accuracy, and energy efficiency of unmanned aerial vehicles (UAVs). Traditional approaches rely on external sensors or simplify vehicle dynamics, which limits their applicability during agile flight or in resource-constrained platforms. This paper proposes a real-time wind estimation method based solely on onboard sensors. The approach first estimates external aerodynamic forces using a disturbance observer (DOB), and then maps these forces to wind vectors using a thin-plate spline (TPS) model. A custom-designed wind barrel mounted on the UAV enhances aerodynamic sensitivity, further improving estimation accuracy. The system is validated through comprehensive experiments in wind tunnels, indoor and outdoor flights. Experimental results demonstrate that the proposed method achieves consistently high-accuracy wind estimation across controlled and real-world conditions, with speed RMSEs as low as \SI{0.06}{m/s} in wind tunnel tests, \SI{0.22}{m/s} during outdoor hover, and below \SI{0.38}{m/s} in indoor and outdoor dynamic flights, and direction RMSEs under \ang{7.3} across all scenarios, outperforming existing baselines. Moreover, the method provides vertical wind estimates -- unavailable in baselines -- with RMSEs below \SI{0.17}{m/s} even during fast indoor translations.
Whole-Body Control With Terrain Estimation of A 6-DoF Wheeled Bipedal Robot
Nov 09, 2025
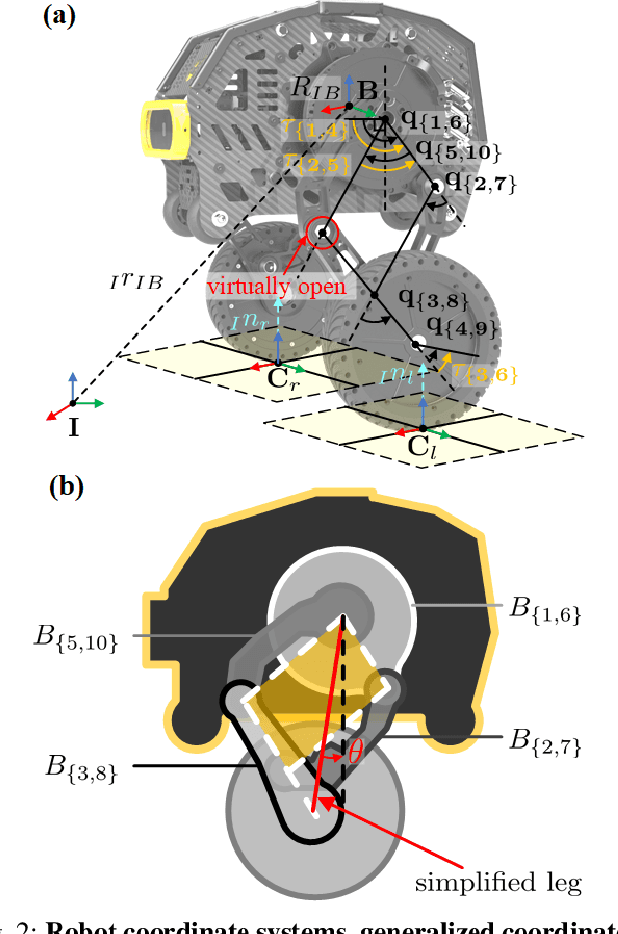
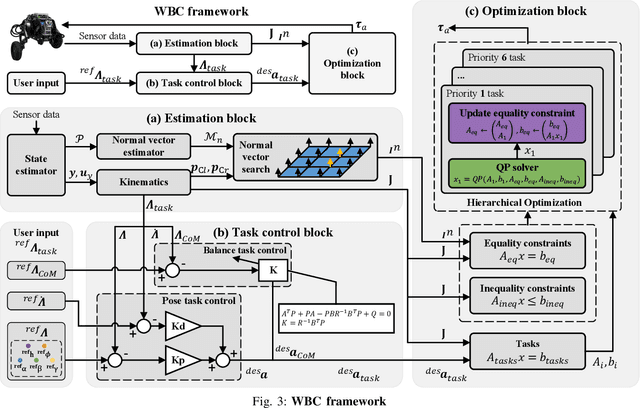
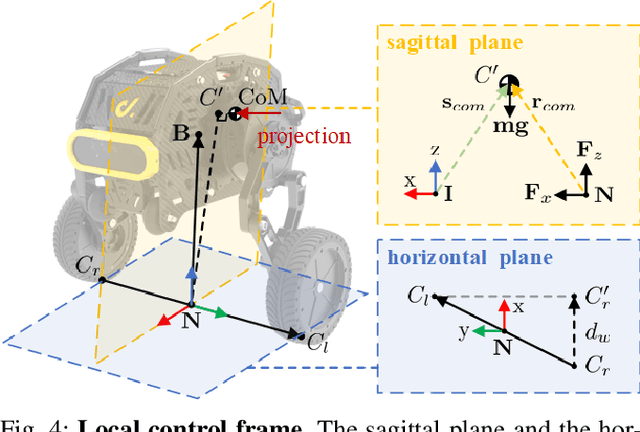
Wheeled bipedal robots have garnered increasing attention in exploration and inspection. However, most research simplifies calculations by ignoring leg dynamics, thereby restricting the robot's full motion potential. Additionally, robots face challenges when traversing uneven terrain. To address the aforementioned issue, we develop a complete dynamics model and design a whole-body control framework with terrain estimation for a novel 6 degrees of freedom wheeled bipedal robot. This model incorporates the closed-loop dynamics of the robot and a ground contact model based on the estimated ground normal vector. We use a LiDAR inertial odometry framework and improved Principal Component Analysis for terrain estimation. Task controllers, including PD control law and LQR, are employed for pose control and centroidal dynamics-based balance control, respectively. Furthermore, a hierarchical optimization approach is used to solve the whole-body control problem. We validate the performance of the terrain estimation algorithm and demonstrate the algorithm's robustness and ability to traverse uneven terrain through both simulation and real-world experiments.
Design and Control of a Coaxial Dual-rotor Reconfigurable Tailsitter UAV Based on Swashplateless Mechanism
Nov 06, 2025The tailsitter vertical takeoff and landing (VTOL) UAV is widely used due to its lower dead weight, which eliminates the actuators and mechanisms for tilting. However, the tailsitter UAV is susceptible to wind disturbances in multi-rotor mode, as it exposes a large frontal fuselage area. To address this issue, our tailsitter UAV features a reconfigurable wing design, allowing wings to retract in multi-rotor mode and extend in fixed- wing mode. Considering power efficiency, we design a coaxial heterogeneous dual-rotor configuration, which significantly re- duces the total power consumption. To reduce structural weight and simplify structural complexity, we employ a swashplateless mechanism with an improved design to control pitch and roll in multi-rotor mode. We optimize the structure of the swashplateless mechanism by adding flapping hinges, which reduces vibration during cyclic acceleration and deceleration. Finally, we perform comprehensive transition flight tests to validate stable flight performance across the entire flight envelope of the tailsitter UAV.
Aerial Grasping via Maximizing Delta-Arm Workspace Utilization
Jun 18, 2025The workspace limits the operational capabilities and range of motion for the systems with robotic arms. Maximizing workspace utilization has the potential to provide more optimal solutions for aerial manipulation tasks, increasing the system's flexibility and operational efficiency. In this paper, we introduce a novel planning framework for aerial grasping that maximizes workspace utilization. We formulate an optimization problem to optimize the aerial manipulator's trajectory, incorporating task constraints to achieve efficient manipulation. To address the challenge of incorporating the delta arm's non-convex workspace into optimization constraints, we leverage a Multilayer Perceptron (MLP) to map position points to feasibility probabilities.Furthermore, we employ Reversible Residual Networks (RevNet) to approximate the complex forward kinematics of the delta arm, utilizing efficient model gradients to eliminate workspace constraints. We validate our methods in simulations and real-world experiments to demonstrate their effectiveness.
IRS: Instance-Level 3D Scene Graphs via Room Prior Guided LiDAR-Camera Fusion
Jun 07, 2025Indoor scene understanding remains a fundamental challenge in robotics, with direct implications for downstream tasks such as navigation and manipulation. Traditional approaches often rely on closed-set recognition or loop closure, limiting their adaptability in open-world environments. With the advent of visual foundation models (VFMs), open-vocabulary recognition and natural language querying have become feasible, unlocking new possibilities for 3D scene graph construction. In this paper, we propose a robust and efficient framework for instance-level 3D scene graph construction via LiDAR-camera fusion. Leveraging LiDAR's wide field of view (FOV) and long-range sensing capabilities, we rapidly acquire room-level geometric priors. Multi-level VFMs are employed to improve the accuracy and consistency of semantic extraction. During instance fusion, room-based segmentation enables parallel processing, while the integration of geometric and semantic cues significantly enhances fusion accuracy and robustness. Compared to state-of-the-art methods, our approach achieves up to an order-of-magnitude improvement in construction speed while maintaining high semantic precision. Extensive experiments in both simulated and real-world environments validate the effectiveness of our approach. We further demonstrate its practical value through a language-guided semantic navigation task, highlighting its potential for real-world robotic applications.
Autonomous Flights inside Narrow Tunnels
May 26, 2025



Multirotors are usually desired to enter confined narrow tunnels that are barely accessible to humans in various applications including inspection, search and rescue, and so on. This task is extremely challenging since the lack of geometric features and illuminations, together with the limited field of view, cause problems in perception; the restricted space and significant ego airflow disturbances induce control issues. This paper introduces an autonomous aerial system designed for navigation through tunnels as narrow as 0.5 m in diameter. The real-time and online system includes a virtual omni-directional perception module tailored for the mission and a novel motion planner that incorporates perception and ego airflow disturbance factors modeled using camera projections and computational fluid dynamics analyses, respectively. Extensive flight experiments on a custom-designed quadrotor are conducted in multiple realistic narrow tunnels to validate the superior performance of the system, even over human pilots, proving its potential for real applications. Additionally, a deployment pipeline on other multirotor platforms is outlined and open-source packages are provided for future developments.
FERMI: Flexible Radio Mapping with a Hybrid Propagation Model and Scalable Autonomous Data Collection
Apr 21, 2025Communication is fundamental for multi-robot collaboration, with accurate radio mapping playing a crucial role in predicting signal strength between robots. However, modeling radio signal propagation in large and occluded environments is challenging due to complex interactions between signals and obstacles. Existing methods face two key limitations: they struggle to predict signal strength for transmitter-receiver pairs not present in the training set, while also requiring extensive manual data collection for modeling, making them impractical for large, obstacle-rich scenarios. To overcome these limitations, we propose FERMI, a flexible radio mapping framework. FERMI combines physics-based modeling of direct signal paths with a neural network to capture environmental interactions with radio signals. This hybrid model learns radio signal propagation more efficiently, requiring only sparse training data. Additionally, FERMI introduces a scalable planning method for autonomous data collection using a multi-robot team. By increasing parallelism in data collection and minimizing robot travel costs between regions, overall data collection efficiency is significantly improved. Experiments in both simulation and real-world scenarios demonstrate that FERMI enables accurate signal prediction and generalizes well to unseen positions in complex environments. It also supports fully autonomous data collection and scales to different team sizes, offering a flexible solution for creating radio maps. Our code is open-sourced at https://github.com/ymLuo1214/Flexible-Radio-Mapping.
Predictor-Based Time Delay Control of A Hex-Jet Unmanned Aerial Vehicle
Mar 12, 2025Turbojet-powered VTOL UAVs have garnered increased attention in heavy-load transport and emergency services, due to their superior power density and thrust-to-weight ratio compared to existing electronic propulsion systems. The main challenge with jet-powered UAVs lies in the complexity of thrust vectoring mechanical systems, which aim to mitigate the slow dynamics of the turbojet. In this letter, we introduce a novel turbojet-powered UAV platform named Hex-Jet. Our concept integrates thrust vectoring and differential thrust for comprehensive attitude control. This approach notably simplifies the thrust vectoring mechanism. We utilize a predictor-based time delay control method based on the frequency domain model in our Hex-Jet controller design to mitigate the delay in roll attitude control caused by turbojet dynamics. Our comparative studies provide valuable insights for the UAV community, and flight tests on the scaled prototype demonstrate the successful implementation and verification of the proposed predictor-based time delay control technique.
Whole-Body Integrated Motion Planning for Aerial Manipulators
Jan 11, 2025Efficient motion planning for Aerial Manipulators (AMs) is essential for tackling complex manipulation tasks, yet achieving coupled trajectory planning remains challenging. In this work, we propose, to the best of our knowledge, the first whole-body integrated motion planning framework for aerial manipulators, which is facilitated by an improved Safe Flight Corridor (SFC) generation strategy and high-dimensional collision-free trajectory planning. In particular, we formulate an optimization problem to generate feasible trajectories for both the quadrotor and manipulator while ensuring collision avoidance, dynamic feasibility, kinematic feasibility, and waypoint constraints. To achieve collision avoidance, we introduce a variable geometry approximation method, which dynamically models the changing collision volume induced by different manipulator configurations. Moreover, waypoint constraints in our framework are defined in $\mathrm{SE(3)\times\mathbb{R}^3}$, allowing the aerial manipulator to traverse specified positions while maintaining desired attitudes and end-effector states. The effectiveness of our framework is validated through comprehensive simulations and real-world experiments across various environments.