 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Flights inside Narrow Tunnels
May 26, 2025



Multirotors are usually desired to enter confined narrow tunnels that are barely accessible to humans in various applications including inspection, search and rescue, and so on. This task is extremely challenging since the lack of geometric features and illuminations, together with the limited field of view, cause problems in perception; the restricted space and significant ego airflow disturbances induce control issues. This paper introduces an autonomous aerial system designed for navigation through tunnels as narrow as 0.5 m in diameter. The real-time and online system includes a virtual omni-directional perception module tailored for the mission and a novel motion planner that incorporates perception and ego airflow disturbance factors modeled using camera projections and computational fluid dynamics analyses, respectively. Extensive flight experiments on a custom-designed quadrotor are conducted in multiple realistic narrow tunnels to validate the superior performance of the system, even over human pilots, proving its potential for real applications. Additionally, a deployment pipeline on other multirotor platforms is outlined and open-source packages are provided for future developments.
The NING Humanoid: The Concurrent Design and Development of a Dynamic and Agile Platform
Aug 02, 2024



The recent surge of interest in agile humanoid robots achieving dynamic tasks like jumping and flipping necessitates the concurrent design of a robot platform that combines exceptional hardware performance with effective control algorithms. This paper introduces the NING Humanoid, an agile and robust platform aimed at achieving human-like athletic capabilities. The NING humanoid features high-torque actuators, a resilient mechanical co-design based on the Centroidal dynamics, and a whole-body model predictive control (WB-MPC) framework. It stands at 1.1 meters tall and weighs 20 kg with 18 degrees of freedom (DOFs). It demonstrates impressive abilities such as walking, push recovery, and stair climbing at a high control bandwidth. Our presentation will encompass a hardware co-design, the control framework, as well as simulation and real-time experiments.
OmniNxt: A Fully Open-source and Compact Aerial Robot with Omnidirectional Visual Perception
Mar 29, 2024Adopting omnidirectional Field of View (FoV) cameras in aerial robots vastly improves perception ability, significantly advancing aerial robotics's capabilities in inspection, reconstruction, and rescue tasks. However, such sensors also elevate system complexity, e.g., hardware design, and corresponding algorithm, which limits researchers from utilizing aerial robots with omnidirectional FoV in their research. To bridge this gap, we propose OmniNxt, a fully open-source aerial robotics platform with omnidirectional perception. We design a high-performance flight controller NxtPX4 and a multi-fisheye camera set for OmniNxt. Meanwhile, the compatible software is carefully devised, which empowers OmniNxt to achieve accurate localization and real-time dense mapping with limited computation resource occupancy. We conducted extensive real-world experiments to validate the superior performance of OmniNxt in practical applications. All the hardware and software are open-access at https://github.com/HKUST-Aerial-Robotics/OmniNxt, and we provide docker images of each crucial module in the proposed system. Project page: https://hkust-aerial-robotics.github.io/OmniNxt.
Coverage Control for a Multi-robot Team with Heterogeneous Capabilities using Block Coordinate Descent Method
Apr 20, 2022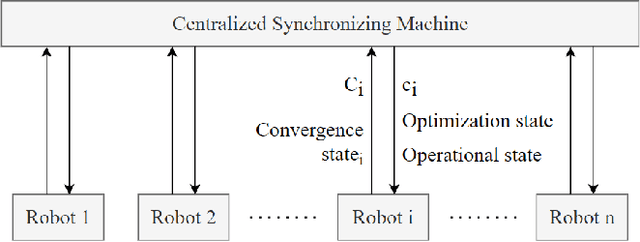


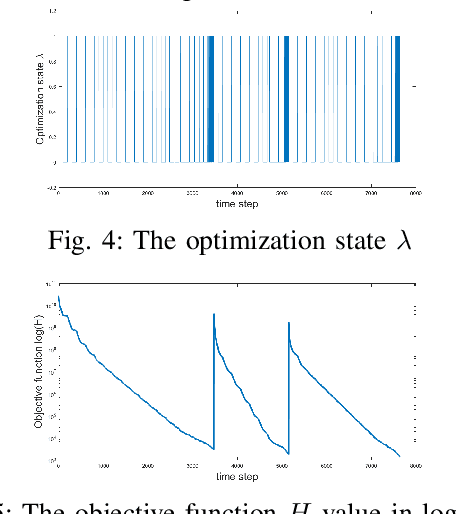
In this paper, we propose a coverage control system for a multi-robot team with heterogeneous capabilities to patrol or monitor a bounded environment. The capability could be defined as any criterion of robots like remaining power or mobile speed, depending on the purpose. The proposed control system aims to allocate different portions of the environment to the robots according to their capabilities, i.e., the robot with higher capability takes a larger portion of the environment while the robot with lower capability takes a smaller one. We use the block coordinate descent (BCD) method to optimize the location of portions and the partitioning method alternately. A centralized machine is used to synchronize the robots and the gradient of each robot can be computed in a distributed manner. Simulation results are provided to illustrate the performance of the proposed control system.