 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Flights inside Narrow Tunnels
May 26, 2025



Multirotors are usually desired to enter confined narrow tunnels that are barely accessible to humans in various applications including inspection, search and rescue, and so on. This task is extremely challenging since the lack of geometric features and illuminations, together with the limited field of view, cause problems in perception; the restricted space and significant ego airflow disturbances induce control issues. This paper introduces an autonomous aerial system designed for navigation through tunnels as narrow as 0.5 m in diameter. The real-time and online system includes a virtual omni-directional perception module tailored for the mission and a novel motion planner that incorporates perception and ego airflow disturbance factors modeled using camera projections and computational fluid dynamics analyses, respectively. Extensive flight experiments on a custom-designed quadrotor are conducted in multiple realistic narrow tunnels to validate the superior performance of the system, even over human pilots, proving its potential for real applications. Additionally, a deployment pipeline on other multirotor platforms is outlined and open-source packages are provided for future developments.
SG-Reg: Generalizable and Efficient Scene Graph Registration
Apr 20, 2025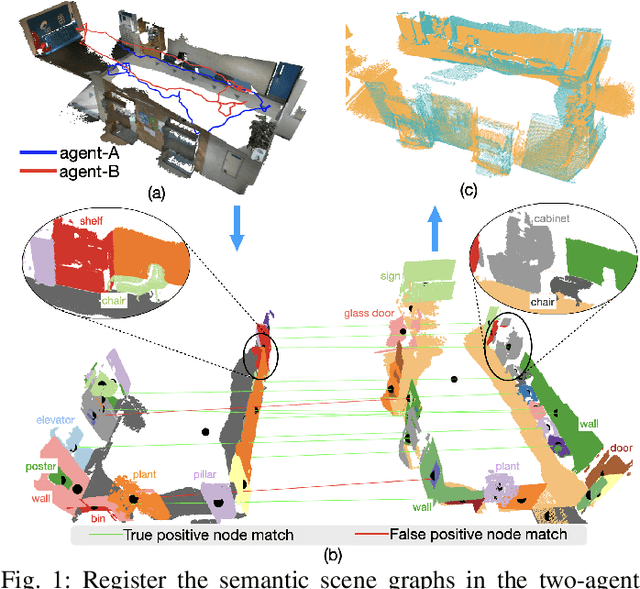

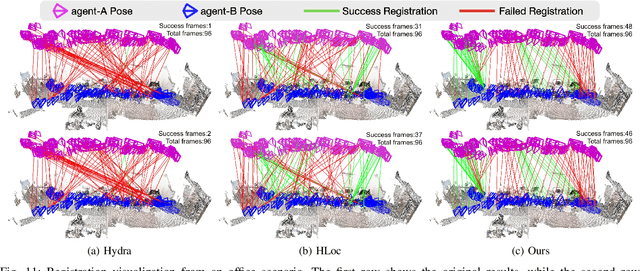
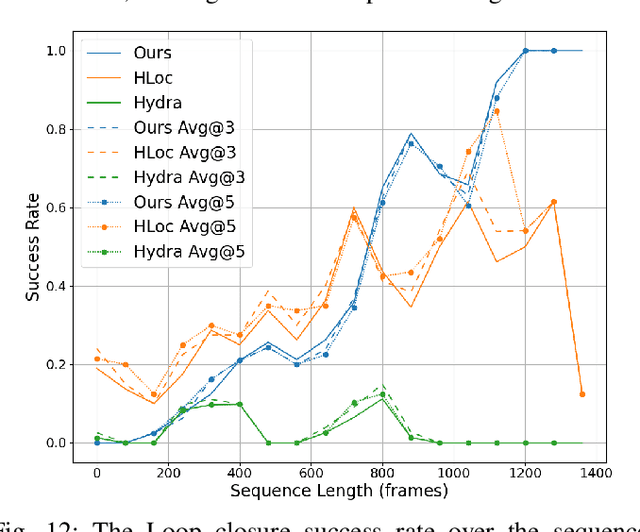
This paper addresses the challenges of registering two rigid semantic scene graphs, an essential capability when an autonomous agent needs to register its map against a remote agent, or against a prior map. The hand-crafted descriptors in classical semantic-aided registration, or the ground-truth annotation reliance in learning-based scene graph registration, impede their application in practical real-world environments. To address the challenges, we design a scene graph network to encode multiple modalities of semantic nodes: open-set semantic feature, local topology with spatial awareness, and shape feature. These modalities are fused to create compact semantic node features. The matching layers then search for correspondences in a coarse-to-fine manner. In the back-end, we employ a robust pose estimator to decide transformation according to the correspondences. We manage to maintain a sparse and hierarchical scene representation. Our approach demands fewer GPU resources and fewer communication bandwidth in multi-agent tasks. Moreover, we design a new data generation approach using vision foundation models and a semantic mapping module to reconstruct semantic scene graphs. It differs significantly from previous works, which rely on ground-truth semantic annotations to generate data. We validate our method in a two-agent SLAM benchmark. It significantly outperforms the hand-crafted baseline in terms of registration success rate. Compared to visual loop closure networks, our method achieves a slightly higher registration recall while requiring only 52 KB of communication bandwidth for each query frame. Code available at: \href{http://github.com/HKUST-Aerial-Robotics/SG-Reg}{http://github.com/HKUST-Aerial-Robotics/SG-Reg}.
UniQuad: A Unified and Versatile Quadrotor Platform Series for UAV Research and Application
Jun 30, 2024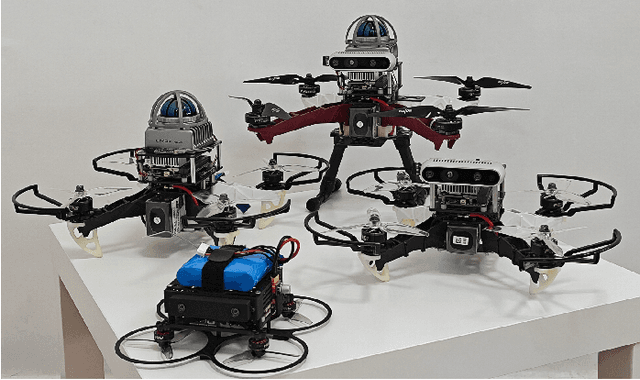

As quadrotors take on an increasingly diverse range of roles, researchers often need to develop new hardware platforms tailored for specific tasks, introducing significant engineering overhead. In this article, we introduce the UniQuad series, a unified and versatile quadrotor platform series that offers high flexibility to adapt to a wide range of common tasks, excellent customizability for advanced demands, and easy maintenance in case of crashes. This project is fully open-source at https://hkust-aerial-robotics.github.io/UniQuad.
OmniNxt: A Fully Open-source and Compact Aerial Robot with Omnidirectional Visual Perception
Mar 29, 2024



Adopting omnidirectional Field of View (FoV) cameras in aerial robots vastly improves perception ability, significantly advancing aerial robotics's capabilities in inspection, reconstruction, and rescue tasks. However, such sensors also elevate system complexity, e.g., hardware design, and corresponding algorithm, which limits researchers from utilizing aerial robots with omnidirectional FoV in their research. To bridge this gap, we propose OmniNxt, a fully open-source aerial robotics platform with omnidirectional perception. We design a high-performance flight controller NxtPX4 and a multi-fisheye camera set for OmniNxt. Meanwhile, the compatible software is carefully devised, which empowers OmniNxt to achieve accurate localization and real-time dense mapping with limited computation resource occupancy. We conducted extensive real-world experiments to validate the superior performance of OmniNxt in practical applications. All the hardware and software are open-access at https://github.com/HKUST-Aerial-Robotics/OmniNxt, and we provide docker images of each crucial module in the proposed system. Project page: https://hkust-aerial-robotics.github.io/OmniNxt.
H2-Mapping: Real-time Dense Mapping Using Hierarchical Hybrid Representation
Jun 05, 2023Constructing a high-quality dense map in real-time is essential for robotics, AR/VR, and digital twins applications. As Neural Radiance Field (NeRF) greatly improves the mapping performance, in this paper, we propose a NeRF-based mapping method that enables higher-quality reconstruction and real-time capability even on edge computers. Specifically, we propose a novel hierarchical hybrid representation that leverages implicit multiresolution hash encoding aided by explicit octree SDF priors, describing the scene at different levels of detail. This representation allows for fast scene geometry initialization and makes scene geometry easier to learn. Besides, we present a coverage-maximizing keyframe selection strategy to address the forgetting issue and enhance mapping quality, particularly in marginal areas. To the best of our knowledge, our method is the first to achieve high-quality NeRF-based mapping on edge computers of handheld devices and quadrotors in real-time. Experiments demonstrate that our method outperforms existing NeRF-based mapping methods in geometry accuracy, texture realism, and time consumption. The code will be released at: https://github.com/SYSU-STAR/H2-Mapping
$D^2$SLAM: Decentralized and Distributed Collaborative Visual-inertial SLAM System for Aerial Swarm
Nov 04, 2022In recent years, aerial swarm technology has developed rapidly. In order to accomplish a fully autonomous aerial swarm, a key technology is decentralized and distributed collaborative SLAM (CSLAM) for aerial swarms, which estimates the relative pose and the consistent global trajectories. In this paper, we propose $D^2$SLAM: a decentralized and distributed ($D^2$) collaborative SLAM algorithm. This algorithm has high local accuracy and global consistency, and the distributed architecture allows it to scale up. $D^2$SLAM covers swarm state estimation in two scenarios: near-field state estimation for high real-time accuracy at close range and far-field state estimation for globally consistent trajectories estimation at the long-range between UAVs. Distributed optimization algorithms are adopted as the backend to achieve the $D^2$ goal. $D^2$SLAM is robust to transient loss of communication, network delays, and other factors. Thanks to the flexible architecture, $D^2$SLAM has the potential of applying in various scenarios.