 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Contact Engagement for Aerial Navigation in Unknown Environments with Glass
May 01, 2025Autonomous aerial robots are increasingly being deployed in real-world scenarios, where transparent glass obstacles present significant challenges to reliable navigation. Researchers have investigated the use of non-contact sensors and passive contact-resilient aerial vehicle designs to detect glass surfaces, which are often limited in terms of robustness and efficiency. In this work, we propose a novel approach for robust autonomous aerial navigation in unknown environments with transparent glass obstacles, combining the strengths of both sensor-based and contact-based glass detection. The proposed system begins with the incremental detection and information maintenance about potential glass surfaces using visual sensor measurements. The vehicle then actively engages in touch actions with the visually detected potential glass surfaces using a pair of lightweight contact-sensing modules to confirm or invalidate their presence. Following this, the volumetric map is efficiently updated with the glass surface information and safe trajectories are replanned on the fly to circumvent the glass obstacles. We validate the proposed system through real-world experiments in various scenarios, demonstrating its effectiveness in enabling efficient and robust autonomous aerial navigation in complex real-world environments with glass obstacles.
UniQuad: A Unified and Versatile Quadrotor Platform Series for UAV Research and Application
Jun 30, 2024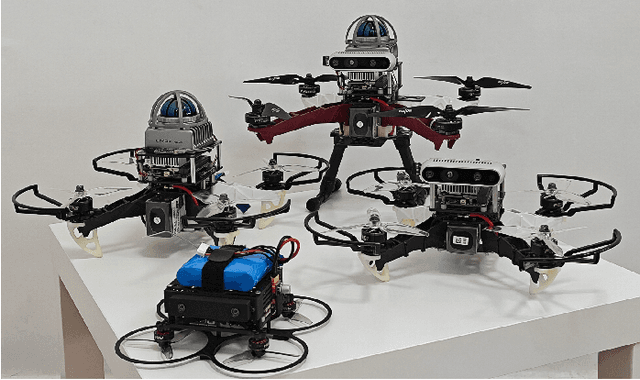
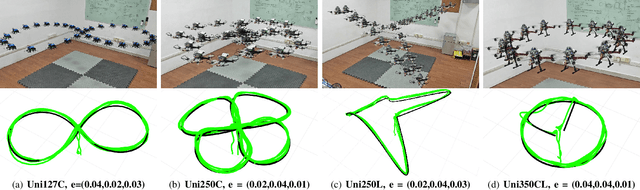

As quadrotors take on an increasingly diverse range of roles, researchers often need to develop new hardware platforms tailored for specific tasks, introducing significant engineering overhead. In this article, we introduce the UniQuad series, a unified and versatile quadrotor platform series that offers high flexibility to adapt to a wide range of common tasks, excellent customizability for advanced demands, and easy maintenance in case of crashes. This project is fully open-source at https://hkust-aerial-robotics.github.io/UniQuad.