 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSG-Reg: Generalizable and Efficient Scene Graph Registration
Apr 20, 2025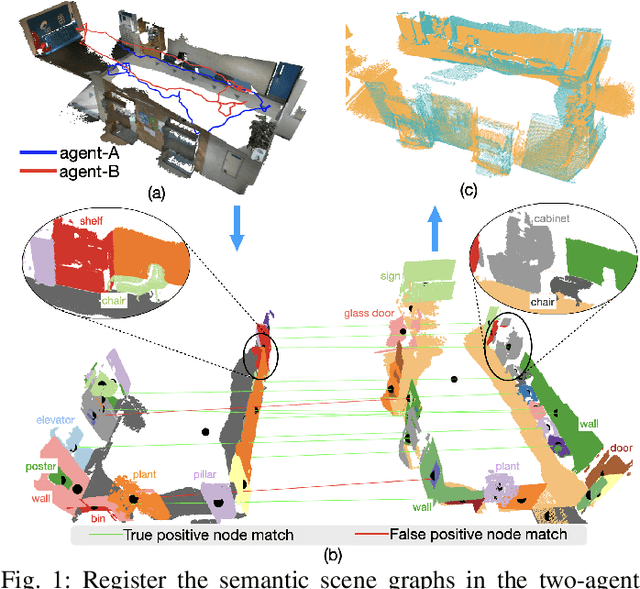

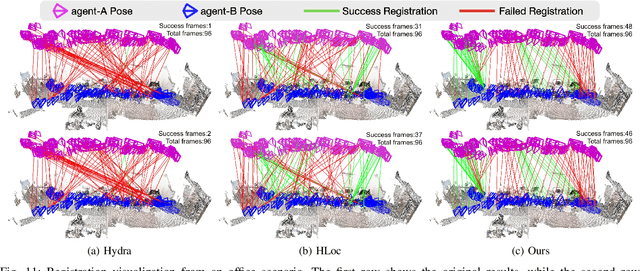
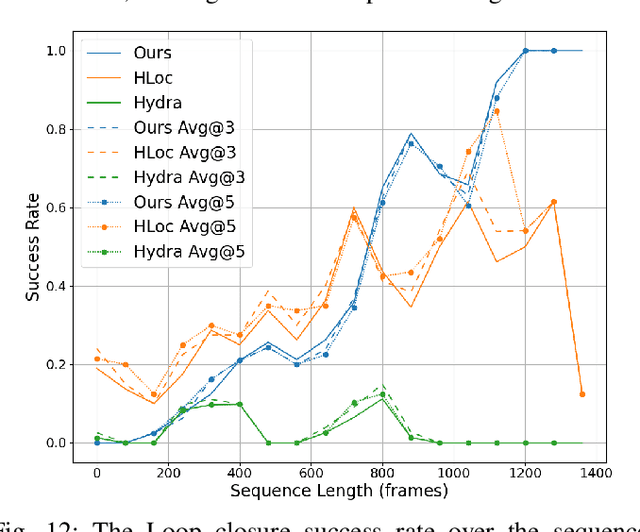
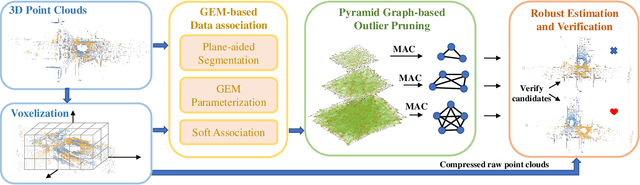
This paper addresses the challenges of registering two rigid semantic scene graphs, an essential capability when an autonomous agent needs to register its map against a remote agent, or against a prior map. The hand-crafted descriptors in classical semantic-aided registration, or the ground-truth annotation reliance in learning-based scene graph registration, impede their application in practical real-world environments. To address the challenges, we design a scene graph network to encode multiple modalities of semantic nodes: open-set semantic feature, local topology with spatial awareness, and shape feature. These modalities are fused to create compact semantic node features. The matching layers then search for correspondences in a coarse-to-fine manner. In the back-end, we employ a robust pose estimator to decide transformation according to the correspondences. We manage to maintain a sparse and hierarchical scene representation. Our approach demands fewer GPU resources and fewer communication bandwidth in multi-agent tasks. Moreover, we design a new data generation approach using vision foundation models and a semantic mapping module to reconstruct semantic scene graphs. It differs significantly from previous works, which rely on ground-truth semantic annotations to generate data. We validate our method in a two-agent SLAM benchmark. It significantly outperforms the hand-crafted baseline in terms of registration success rate. Compared to visual loop closure networks, our method achieves a slightly higher registration recall while requiring only 52 KB of communication bandwidth for each query frame. Code available at: \href{http://github.com/HKUST-Aerial-Robotics/SG-Reg}{http://github.com/HKUST-Aerial-Robotics/SG-Reg}.
SLABIM: A SLAM-BIM Coupled Dataset in HKUST Main Building
Feb 24, 2025



Existing indoor SLAM datasets primarily focus on robot sensing, often lacking building architectures. To address this gap, we design and construct the first dataset to couple the SLAM and BIM, named SLABIM. This dataset provides BIM and SLAM-oriented sensor data, both modeling a university building at HKUST. The as-designed BIM is decomposed and converted for ease of use. We employ a multi-sensor suite for multi-session data collection and mapping to obtain the as-built model. All the related data are timestamped and organized, enabling users to deploy and test effectively. Furthermore, we deploy advanced methods and report the experimental results on three tasks: registration, localization and semantic mapping, demonstrating the effectiveness and practicality of SLABIM. We make our dataset open-source at https://github.com/HKUST-Aerial-Robotics/SLABIM.
SLIM: Scalable and Lightweight LiDAR Mapping in Urban Environments
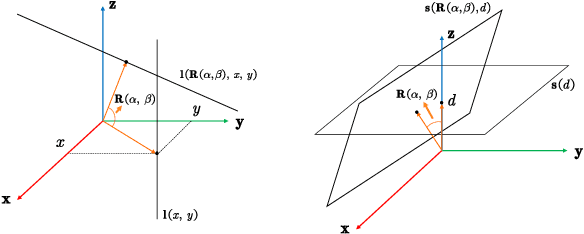
Sep 13, 2024LiDAR point cloud maps are extensively utilized on roads for robot navigation due to their high consistency. However, dense point clouds face challenges of high memory consumption and reduced maintainability for long-term operations. In this study, we introduce SLIM, a scalable and lightweight mapping system for long-term LiDAR mapping in urban environments. The system begins by parameterizing structural point clouds into lines and planes. These lightweight and structural representations meet the requirements of map merging, pose graph optimization, and bundle adjustment, ensuring incremental management and local consistency. For long-term operations, a map-centric nonlinear factor recovery method is designed to sparsify poses while preserving mapping accuracy. We validate the SLIM system with multi-session real-world LiDAR data from classical LiDAR mapping datasets, including KITTI, NCLT, and HeLiPR. The experiments demonstrate its capabilities in mapping accuracy, lightweightness, and scalability. Map re-use is also verified through map-based robot localization. Ultimately, with multi-session LiDAR data, the SLIM system provides a globally consistent map with low memory consumption (130 KB/km). We have made our code open-source to benefit the community.
Speak the Same Language: Global LiDAR Registration on BIM Using Pose Hough Transform
May 07, 2024



The construction and robotic sensing data originate from disparate sources and are associated with distinct frames of reference. The primary objective of this study is to align LiDAR point clouds with building information modeling (BIM) using a global point cloud registration approach, aimed at establishing a shared understanding between the two modalities, i.e., ``speak the same language''. To achieve this, we design a cross-modality registration method, spanning from front end the back end. At the front end, we extract descriptors by identifying walls and capturing the intersected corners. Subsequently, for the back-end pose estimation, we employ the Hough transform for pose estimation and estimate multiple pose candidates. The final pose is verified by wall-pixel correlation. To evaluate the effectiveness of our method, we conducted real-world multi-session experiments in a large-scale university building, involving two different types of LiDAR sensors. We also report our findings and plan to make our collected dataset open-sourced.
FM-Fusion: Instance-aware Semantic Mapping Boosted by Vision-Language Foundation Models
Feb 07, 2024Semantic mapping based on the supervised object detectors is sensitive to image distribution. In real-world environments, the object detection and segmentation performance can lead to a major drop, preventing the use of semantic mapping in a wider domain. On the other hand, the development of vision-language foundation models demonstrates a strong zero-shot transferability across data distribution. It provides an opportunity to construct generalizable instance-aware semantic maps. Hence, this work explores how to boost instance-aware semantic mapping from object detection generated from foundation models. We propose a probabilistic label fusion method to predict close-set semantic classes from open-set label measurements. An instance refinement module merges the over-segmented instances caused by inconsistent segmentation. We integrate all the modules into a unified semantic mapping system. Reading a sequence of RGB-D input, our work incrementally reconstructs an instance-aware semantic map. We evaluate the zero-shot performance of our method in ScanNet and SceneNN datasets. Our method achieves 40.3 mean average precision (mAP) on the ScanNet semantic instance segmentation task. It outperforms the traditional semantic mapping method significantly.
Less is More: Physical-enhanced Radar-Inertial Odometry
Feb 03, 2024Radar offers the advantage of providing additional physical properties related to observed objects. In this study, we design a physical-enhanced radar-inertial odometry system that capitalizes on the Doppler velocities and radar cross-section information. The filter for static radar points, correspondence estimation, and residual functions are all strengthened by integrating the physical properties. We conduct experiments on both public datasets and our self-collected data, with different mobile platforms and sensor types. Our quantitative results demonstrate that the proposed radar-inertial odometry system outperforms alternative methods using the physical-enhanced components. Our findings also reveal that using the physical properties results in fewer radar points for odometry estimation, but the performance is still guaranteed and even improved, thus aligning with the ``less is more'' principle.
G3Reg: Pyramid Graph-based Global Registration using Gaussian Ellipsoid Model
Aug 22, 2023
This study introduces a novel framework, G3Reg, for fast and robust global registration of LiDAR point clouds. In contrast to conventional complex keypoints and descriptors, we extract fundamental geometric primitives including planes, clusters, and lines (PCL) from the raw point cloud to obtain low-level semantic segments. Each segment is formulated as a unified Gaussian Ellipsoid Model (GEM) by employing a probability ellipsoid to ensure the ground truth centers are encompassed with a certain degree of probability. Utilizing these GEMs, we then present a distrust-and-verify scheme based on a Pyramid Compatibility Graph for Global Registration (PAGOR). Specifically, we establish an upper bound, which can be traversed based on the confidence level for compatibility testing to construct the pyramid graph. Gradually, we solve multiple maximum cliques (MAC) for each level of the graph, generating numerous transformation candidates. In the verification phase, we adopt a precise and efficient metric for point cloud alignment quality, founded on geometric primitives, to identify the optimal candidate. The performance of the algorithm is extensively validated on three publicly available datasets and a self-collected multi-session dataset, without changing any parameter settings in the experimental evaluation. The results exhibit superior robustness and real-time performance of the G3Reg framework compared to state-of-the-art methods. Furthermore, we demonstrate the potential for integrating individual GEM and PAGOR components into other algorithmic frameworks to enhance their efficacy. To advance further research and promote community understanding, we have publicly shared the source code.
Pyramid Semantic Graph-based Global Point Cloud Registration with Low Overlap
Jul 22, 2023Global point cloud registration is essential in many robotics tasks like loop closing and relocalization. Unfortunately, the registration often suffers from the low overlap between point clouds, a frequent occurrence in practical applications due to occlusion and viewpoint change. In this paper, we propose a graph-theoretic framework to address the problem of global point cloud registration with low overlap. To this end, we construct a consistency graph to facilitate robust data association and employ graduated non-convexity (GNC) for reliable pose estimation, following the state-of-the-art (SoTA) methods. Unlike previous approaches, we use semantic cues to scale down the dense point clouds, thus reducing the problem size. Moreover, we address the ambiguity arising from the consistency threshold by constructing a pyramid graph with multi-level consistency thresholds. Then we propose a cascaded gradient ascend method to solve the resulting densest clique problem and obtain multiple pose candidates for every consistency threshold. Finally, fast geometric verification is employed to select the optimal estimation from multiple pose candidates. Our experiments, conducted on a self-collected indoor dataset and the public KITTI dataset, demonstrate that our method achieves the highest success rate despite the low overlap of point clouds and low semantic quality. We have open-sourced our code https://github.com/HKUST-Aerial-Robotics/Pagor for this project.
Online Monocular Lane Mapping Using Catmull-Rom Spline
Jul 21, 2023In this study, we introduce an online monocular lane mapping approach that solely relies on a single camera and odometry for generating spline-based maps. Our proposed technique models the lane association process as an assignment issue utilizing a bipartite graph, and assigns weights to the edges by incorporating Chamfer distance, pose uncertainty, and lateral sequence consistency. Furthermore, we meticulously design control point initialization, spline parameterization, and optimization to progressively create, expand, and refine splines. In contrast to prior research that assessed performance using self-constructed datasets, our experiments are conducted on the openly accessible OpenLane dataset. The experimental outcomes reveal that our suggested approach enhances lane association and odometry precision, as well as overall lane map quality. We have open-sourced our code1 for this project.
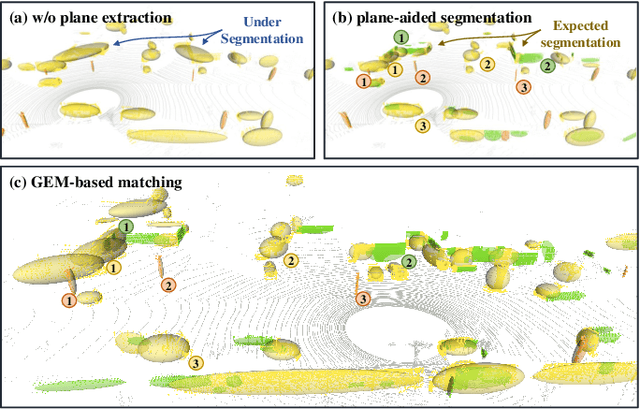
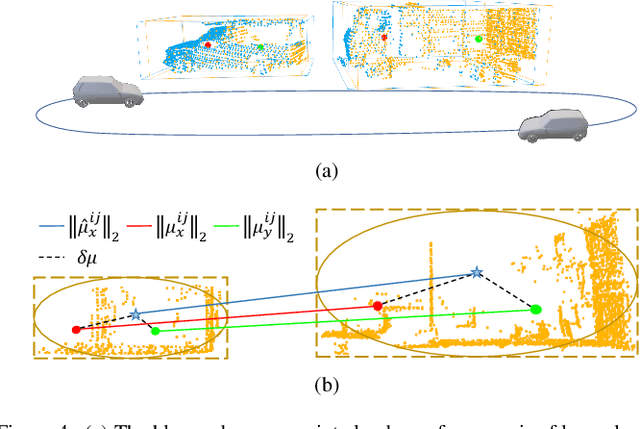
Multi-Session, Localization-oriented and Lightweight LiDAR Mapping Using Semantic Lines and Planes
Jul 14, 2023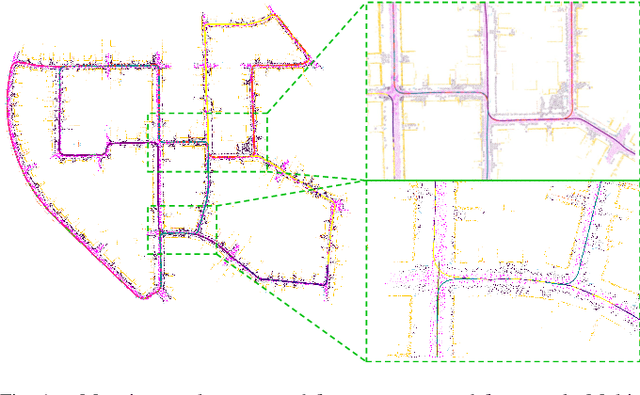
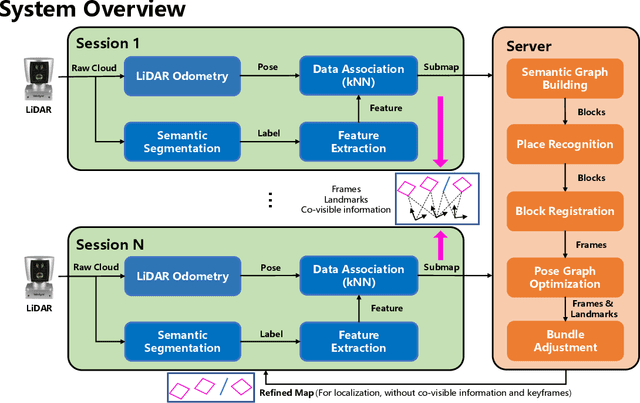
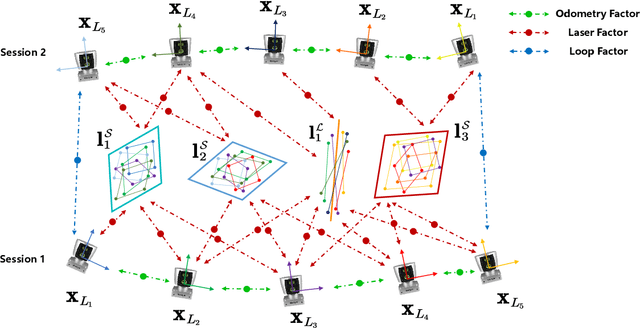
In this paper, we present a centralized framework for multi-session LiDAR mapping in urban environments, by utilizing lightweight line and plane map representations instead of widely used point clouds. The proposed framework achieves consistent mapping in a coarse-to-fine manner. Global place recognition is achieved by associating lines and planes on the Grassmannian manifold, followed by an outlier rejection-aided pose graph optimization for map merging. Then a novel bundle adjustment is also designed to improve the local consistency of lines and planes. In the experimental section, both public and self-collected datasets are used to demonstrate efficiency and effectiveness. Extensive results validate that our LiDAR mapping framework could merge multi-session maps globally, optimize maps incrementally, and is applicable for lightweight robot localization.