 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSPGen: Spherical Projection as Consistent and Flexible Representation for Single Image 3D Shape Generation
Sep 16, 2025
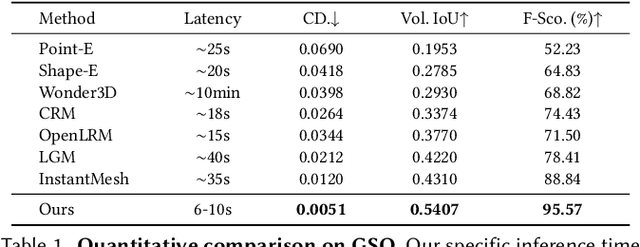
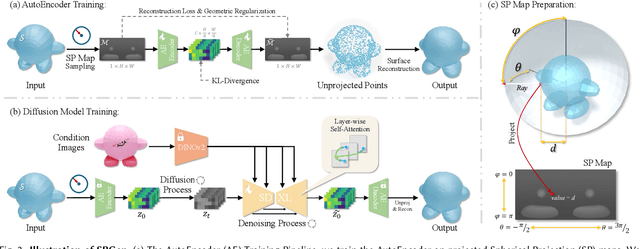
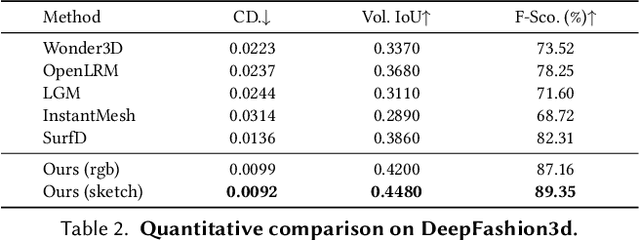
Existing single-view 3D generative models typically adopt multiview diffusion priors to reconstruct object surfaces, yet they remain prone to inter-view inconsistencies and are unable to faithfully represent complex internal structure or nontrivial topologies. In particular, we encode geometry information by projecting it onto a bounding sphere and unwrapping it into a compact and structural multi-layer 2D Spherical Projection (SP) representation. Operating solely in the image domain, SPGen offers three key advantages simultaneously: (1) Consistency. The injective SP mapping encodes surface geometry with a single viewpoint which naturally eliminates view inconsistency and ambiguity; (2) Flexibility. Multi-layer SP maps represent nested internal structures and support direct lifting to watertight or open 3D surfaces; (3) Efficiency. The image-domain formulation allows the direct inheritance of powerful 2D diffusion priors and enables efficient finetuning with limited computational resources. Extensive experiments demonstrate that SPGen significantly outperforms existing baselines in geometric quality and computational efficiency.
SolidGS: Consolidating Gaussian Surfel Splatting for Sparse-View Surface Reconstruction
Dec 19, 2024



Gaussian splatting has achieved impressive improvements for both novel-view synthesis and surface reconstruction from multi-view images. However, current methods still struggle to reconstruct high-quality surfaces from only sparse view input images using Gaussian splatting. In this paper, we propose a novel method called SolidGS to address this problem. We observed that the reconstructed geometry can be severely inconsistent across multi-views, due to the property of Gaussian function in geometry rendering. This motivates us to consolidate all Gaussians by adopting a more solid kernel function, which effectively improves the surface reconstruction quality. With the additional help of geometrical regularization and monocular normal estimation, our method achieves superior performance on the sparse view surface reconstruction than all the Gaussian splatting methods and neural field methods on the widely used DTU, Tanks-and-Temples, and LLFF datasets.
vLPD-Net: A Registration-aided Domain Adaptation Network for 3D Point Cloud Based Place Recognition
Dec 09, 2020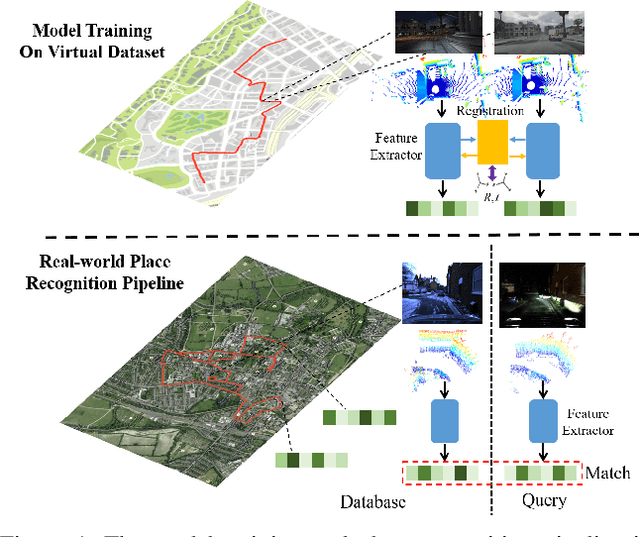

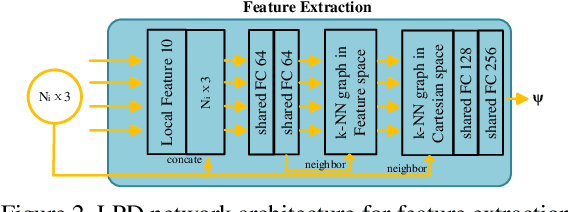
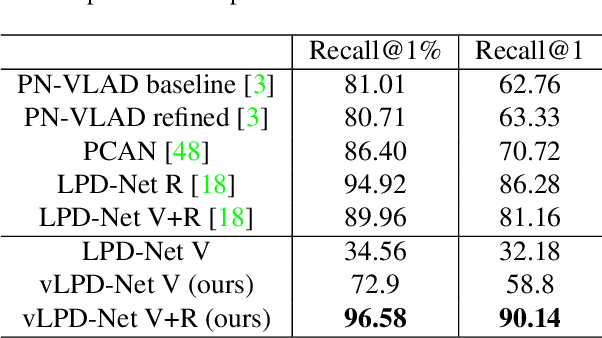
In the field of large-scale SLAM for autonomous driving and mobile robotics, 3D point cloud based place recognition has aroused significant research interest due to its robustness to changing environments with drastic daytime and weather variance. However, it is time-consuming and effort-costly to obtain high-quality point cloud data and groundtruth for registration and place recognition model training in the real world. To this end, a novel registration-aided 3D domain adaptation network for point cloud based place recognition is proposed. A structure-aware registration network is introduced to help learn feature from geometric properties and a matching rate based triplet loss is involved for metric learning. The model is trained through a new virtual LiDAR dataset through GTA-V with diverse weather and daytime conditions and domain adaptation is implemented to the real-world domain by aligning the local and global features. Extensive experiments have been conducted to validate the effectiveness of the structure-aware registration network and domain adaptation. Our results outperform state-of-the-art 3D place recognition baselines on the real-world Oxford RobotCar dataset with the visualization of large-scale registration on the virtual dataset.