 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMapEval: Towards Unified, Robust and Efficient SLAM Map Evaluation Framework
Nov 26, 2024



Evaluating massive-scale point cloud maps in Simultaneous Localization and Mapping (SLAM) remains challenging, primarily due to the absence of unified, robust and efficient evaluation frameworks. We present MapEval, an open-source framework for comprehensive quality assessment of point cloud maps, specifically addressing SLAM scenarios where ground truth map is inherently sparse compared to the mapped environment. Through systematic analysis of existing evaluation metrics in SLAM applications, we identify their fundamental limitations and establish clear guidelines for consistent map quality assessment. Building upon these insights, we propose a novel Gaussian-approximated Wasserstein distance in voxelized space, enabling two complementary metrics under the same error standard: Voxelized Average Wasserstein Distance (AWD) for global geometric accuracy and Spatial Consistency Score (SCS) for local consistency evaluation. This theoretical foundation leads to significant improvements in both robustness against noise and computational efficiency compared to conventional metrics. Extensive experiments on both simulated and real-world datasets demonstrate that MapEval achieves at least \SI{100}{}-\SI{500}{} times faster while maintaining evaluation integrity. The MapEval library\footnote{\texttt{https://github.com/JokerJohn/Cloud\_Map\_Evaluation}} will be publicly available to promote standardized map evaluation practices in the robotics community.
MS-Mapping: An Uncertainty-Aware Large-Scale Multi-Session LiDAR Mapping System
Aug 07, 2024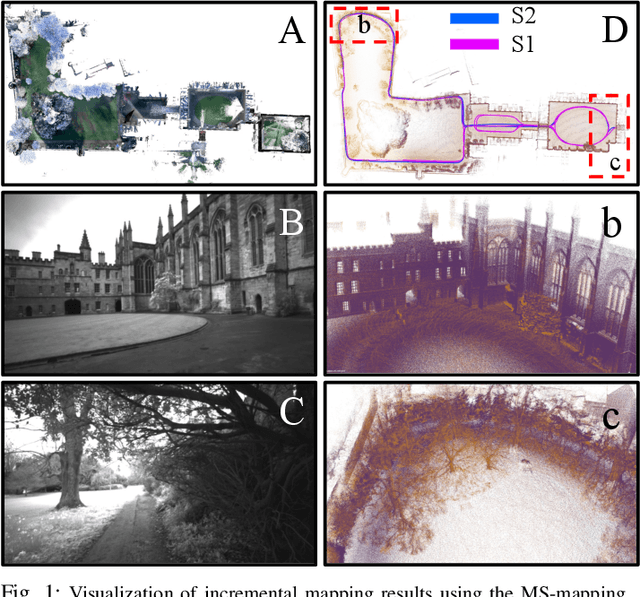
Large-scale multi-session LiDAR mapping is essential for a wide range of applications, including surveying, autonomous driving, crowdsourced mapping, and multi-agent navigation. However, existing approaches often struggle with data redundancy, robustness, and accuracy in complex environments. To address these challenges, we present MS-Mapping, an novel multi-session LiDAR mapping system that employs an incremental mapping scheme for robust and accurate map assembly in large-scale environments. Our approach introduces three key innovations: 1) A distribution-aware keyframe selection method that captures the subtle contributions of each point cloud frame to the map by analyzing the similarity of map distributions. This method effectively reduces data redundancy and pose graph size, while enhancing graph optimization speed; 2) An uncertainty model that automatically performs least-squares adjustments according to the covariance matrix during graph optimization, improving mapping precision, robustness, and flexibility without the need for scene-specific parameter tuning. This uncertainty model enables our system to monitor pose uncertainty and avoid ill-posed optimizations, thereby increasing adaptability to diverse and challenging environments. 3) To ensure fair evaluation, we redesign baseline comparisons and the evaluation benchmark. Direct assessment of map accuracy demonstrates the superiority of the proposed MS-Mapping algorithm compared to state-of-the-art methods. In addition to employing public datasets such as Urban-Nav, FusionPortable, and Newer College, we conducted extensive experiments on such a large \SI{855}{m}$\times$\SI{636}{m} ground truth map, collecting over \SI{20}{km} of indoor and outdoor data across more than ten sequences...
G3Reg: Pyramid Graph-based Global Registration using Gaussian Ellipsoid Model
Aug 22, 2023
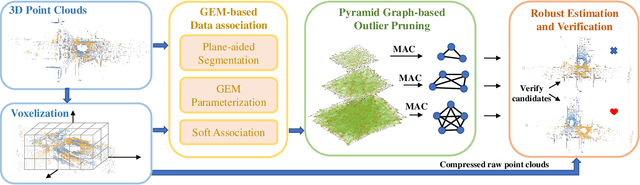
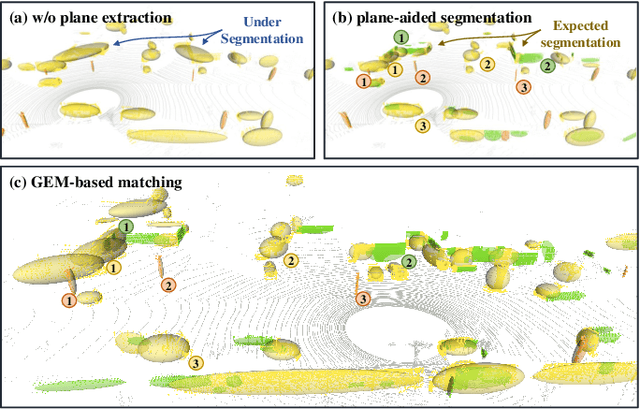
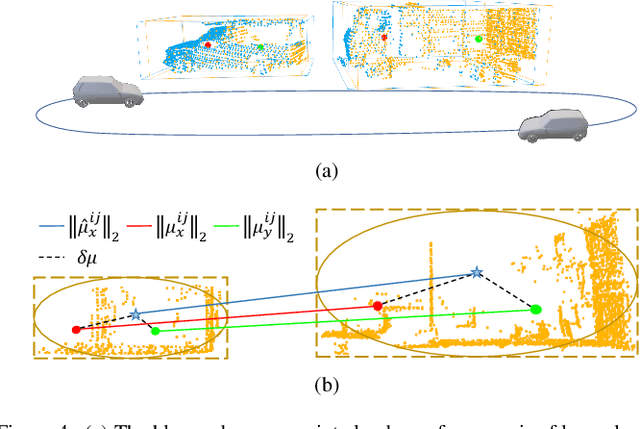
This study introduces a novel framework, G3Reg, for fast and robust global registration of LiDAR point clouds. In contrast to conventional complex keypoints and descriptors, we extract fundamental geometric primitives including planes, clusters, and lines (PCL) from the raw point cloud to obtain low-level semantic segments. Each segment is formulated as a unified Gaussian Ellipsoid Model (GEM) by employing a probability ellipsoid to ensure the ground truth centers are encompassed with a certain degree of probability. Utilizing these GEMs, we then present a distrust-and-verify scheme based on a Pyramid Compatibility Graph for Global Registration (PAGOR). Specifically, we establish an upper bound, which can be traversed based on the confidence level for compatibility testing to construct the pyramid graph. Gradually, we solve multiple maximum cliques (MAC) for each level of the graph, generating numerous transformation candidates. In the verification phase, we adopt a precise and efficient metric for point cloud alignment quality, founded on geometric primitives, to identify the optimal candidate. The performance of the algorithm is extensively validated on three publicly available datasets and a self-collected multi-session dataset, without changing any parameter settings in the experimental evaluation. The results exhibit superior robustness and real-time performance of the G3Reg framework compared to state-of-the-art methods. Furthermore, we demonstrate the potential for integrating individual GEM and PAGOR components into other algorithmic frameworks to enhance their efficacy. To advance further research and promote community understanding, we have publicly shared the source code.
Contour Context: Abstract Structural Distribution for 3D LiDAR Loop Detection and Metric Pose Estimation
Feb 13, 2023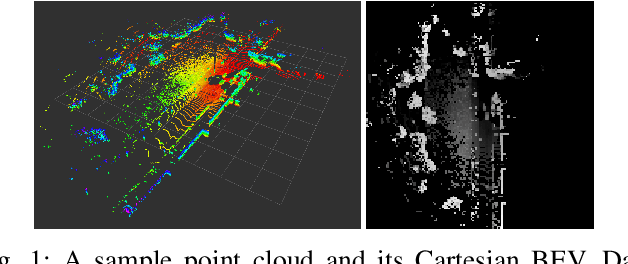
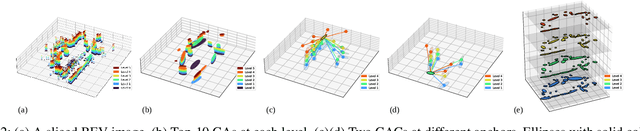
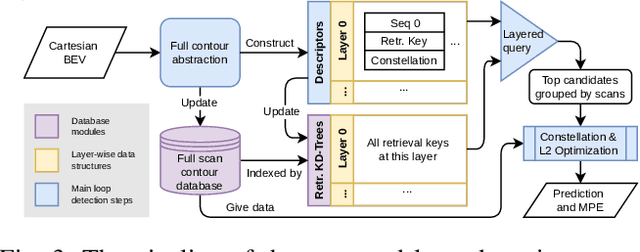
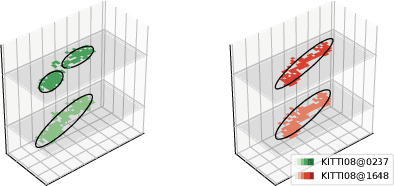
This paper proposes \textit{Contour Context}, a simple, effective, and efficient topological loop closure detection pipeline with accurate 3-DoF metric pose estimation, targeting the urban utonomous driving scenario. We interpret the Cartesian birds' eye view (BEV) image projected from 3D LiDAR points as layered distribution of structures. To recover elevation information from BEVs, we slice them at different heights, and connected pixels at each level will form contours. Each contour is parameterized by abstract information, e.g., pixel count, center position, covariance, and mean height. The similarity of two BEVs is calculated in sequential discrete and continuous steps. The first step considers the geometric consensus of graph-like constellations formed by contours in particular localities. The second step models the majority of contours as a 2.5D Gaussian mixture model, which is used to calculate correlation and optimize relative transform in continuous space. A retrieval key is designed to accelerate the search of a database indexed by layered KD-trees. We validate the efficacy of our method by comparing it with recent works on public datasets.