 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMS-Mapping: An Uncertainty-Aware Large-Scale Multi-Session LiDAR Mapping System
Paper and Code
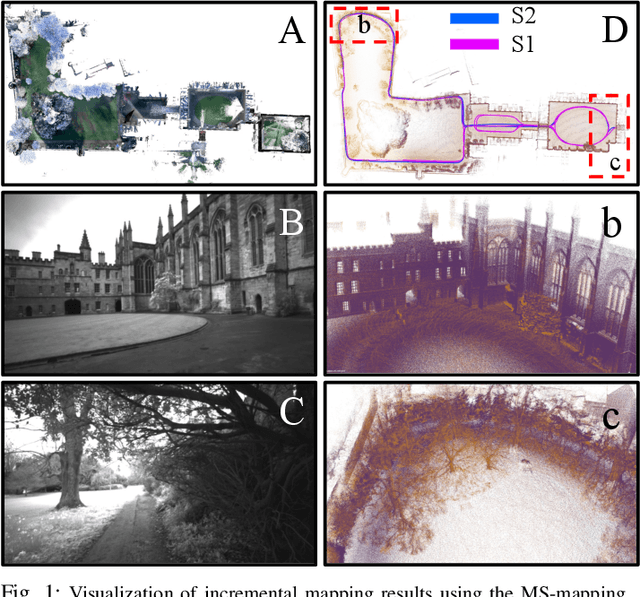
Large-scale multi-session LiDAR mapping is essential for a wide range of applications, including surveying, autonomous driving, crowdsourced mapping, and multi-agent navigation. However, existing approaches often struggle with data redundancy, robustness, and accuracy in complex environments. To address these challenges, we present MS-Mapping, an novel multi-session LiDAR mapping system that employs an incremental mapping scheme for robust and accurate map assembly in large-scale environments. Our approach introduces three key innovations: 1) A distribution-aware keyframe selection method that captures the subtle contributions of each point cloud frame to the map by analyzing the similarity of map distributions. This method effectively reduces data redundancy and pose graph size, while enhancing graph optimization speed; 2) An uncertainty model that automatically performs least-squares adjustments according to the covariance matrix during graph optimization, improving mapping precision, robustness, and flexibility without the need for scene-specific parameter tuning. This uncertainty model enables our system to monitor pose uncertainty and avoid ill-posed optimizations, thereby increasing adaptability to diverse and challenging environments. 3) To ensure fair evaluation, we redesign baseline comparisons and the evaluation benchmark. Direct assessment of map accuracy demonstrates the superiority of the proposed MS-Mapping algorithm compared to state-of-the-art methods. In addition to employing public datasets such as Urban-Nav, FusionPortable, and Newer College, we conducted extensive experiments on such a large \SI{855}{m}$\times$\SI{636}{m} ground truth map, collecting over \SI{20}{km} of indoor and outdoor data across more than ten sequences...