 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMemory-Efficient Boundary Map for Large-Scale Occupancy Grid Mapping
Mar 23, 2026Determining the occupancy status of locations in the environment is a fundamental task for safety-critical robotic applications. Traditional occupancy grid mapping methods subdivide the environment into a grid of voxels, each associated with one of three occupancy states: free, occupied, or unknown. These methods explicitly maintain all voxels within the mapped volume and determine the occupancy state of a location by directly querying the corresponding voxel that the location falls within. However, maintaining all grid voxels in high-resolution and large-scale scenarios requires substantial memory resources. In this paper, we introduce a novel representation that only maintains the boundary of the mapped volume. Specifically, we explicitly represent the boundary voxels, such as the occupied voxels and frontier voxels, while free and unknown voxels are automatically represented by volumes within or outside the boundary, respectively. As our representation maintains only a closed surface in two-dimensional (2D) space, instead of the entire volume in three-dimensional (3D) space, it significantly reduces memory consumption. Then, based on this 2D representation, we propose a method to determine the occupancy state of arbitrary locations in the 3D environment. We term this method as boundary map. Besides, we design a novel data structure for maintaining the boundary map, supporting efficient occupancy state queries. Theoretical analyses of the occupancy state query algorithm are also provided. Furthermore, to enable efficient construction and updates of the boundary map from the real-time sensor measurements, we propose a global-local mapping framework and corresponding update algorithms. Finally, we will make our implementation of the boundary map open-source on GitHub to benefit the community:https://github.com/hku-mars/BDM.
Real-Time AI-Driven Milling Digital Twin Towards Extreme Low-Latency
Dec 15, 2025



Digital twin (DT) enables smart manufacturing by leveraging real-time data, AI models, and intelligent control systems. This paper presents a state-of-the-art analysis on the emerging field of DTs in the context of milling. The critical aspects of DT are explored through the lens of virtual models of physical milling, data flow from physical milling to virtual model, and feedback from virtual model to physical milling. Live data streaming protocols and virtual modeling methods are highlighted. A case study showcases the transformative capability of a real-time machine learning-driven live DT of tool-work contact in a milling process. Future research directions are outlined to achieve the goals of Industry 4.0 and beyond.
Flying through cluttered and dynamic environments with LiDAR
Apr 24, 2025



Navigating unmanned aerial vehicles (UAVs) through cluttered and dynamic environments remains a significant challenge, particularly when dealing with fast-moving or sudden-appearing obstacles. This paper introduces a complete LiDAR-based system designed to enable UAVs to avoid various moving obstacles in complex environments. Benefiting the high computational efficiency of perception and planning, the system can operate in real time using onboard computing resources with low latency. For dynamic environment perception, we have integrated our previous work, M-detector, into the system. M-detector ensures that moving objects of different sizes, colors, and types are reliably detected. For dynamic environment planning, we incorporate dynamic object predictions into the integrated planning and control (IPC) framework, namely DynIPC. This integration allows the UAV to utilize predictions about dynamic obstacles to effectively evade them. We validate our proposed system through both simulations and real-world experiments. In simulation tests, our system outperforms state-of-the-art baselines across several metrics, including success rate, time consumption, average flight time, and maximum velocity. In real-world trials, our system successfully navigates through forests, avoiding moving obstacles along its path.
LiDAR-based Quadrotor Autonomous Inspection System in Cluttered Environments
Mar 29, 2025In recent years, autonomous unmanned aerial vehicle (UAV) technology has seen rapid advancements, significantly improving operational efficiency and mitigating risks associated with manual tasks in domains such as industrial inspection, agricultural monitoring, and search-and-rescue missions. Despite these developments, existing UAV inspection systems encounter two critical challenges: limited reliability in complex, unstructured, and GNSS-denied environments, and a pronounced dependency on skilled operators. To overcome these limitations, this study presents a LiDAR-based UAV inspection system employing a dual-phase workflow: human-in-the-loop inspection and autonomous inspection. During the human-in-the-loop phase, untrained pilots are supported by autonomous obstacle avoidance, enabling them to generate 3D maps, specify inspection points, and schedule tasks. Inspection points are then optimized using the Traveling Salesman Problem (TSP) to create efficient task sequences. In the autonomous phase, the quadrotor autonomously executes the planned tasks, ensuring safe and efficient data acquisition. Comprehensive field experiments conducted in various environments, including slopes, landslides, agricultural fields, factories, and forests, confirm the system's reliability and flexibility. Results reveal significant enhancements in inspection efficiency, with autonomous operations reducing trajectory length by up to 40\% and flight time by 57\% compared to human-in-the-loop operations. These findings underscore the potential of the proposed system to enhance UAV-based inspections in safety-critical and resource-constrained scenarios.
Enhancing Recommendation Systems with GNNs and Addressing Over-Smoothing
Dec 04, 2024



This paper addresses key challenges in enhancing recommendation systems by leveraging Graph Neural Networks (GNNs) and addressing inherent limitations such as over-smoothing, which reduces model effectiveness as network hierarchy deepens. The proposed approach introduces three GNN-based recommendation models, specifically designed to mitigate over-smoothing through innovative mechanisms like residual connections and identity mapping within the aggregation propagation process. These modifications enable more effective information flow across layers, preserving essential user-item interaction details to improve recommendation accuracy. Additionally, the study emphasizes the critical need for interpretability in recommendation systems, aiming to provide transparent and justifiable suggestions tailored to dynamic user preferences. By integrating collaborative filtering with GNN architectures, the proposed models not only enhance predictive accuracy but also align recommendations more closely with individual behaviors, adapting to nuanced shifts in user interests. This work advances the field by tackling both technical and user-centric challenges, contributing to the development of robust and explainable recommendation systems capable of managing the complexity and scale of modern online environments.
Metric Learning for Tag Recommendation: Tackling Data Sparsity and Cold Start Issues
Nov 10, 2024


With the rapid growth of digital information, personalized recommendation systems have become an indispensable part of Internet services, especially in the fields of e-commerce, social media, and online entertainment. However, traditional collaborative filtering and content-based recommendation methods have limitations in dealing with data sparsity and cold start problems, especially in the face of largescale heterogeneous data, which makes it difficult to meet user expectations. This paper proposes a new label recommendation algorithm based on metric learning, which aims to overcome the challenges of traditional recommendation systems by learning effective distance or similarity metrics to capture the subtle differences between user preferences and item features. Experimental results show that the algorithm outperforms baseline methods including local response metric learning (LRML), collaborative metric learning (CML), and adaptive tensor factorization (ATF) based on adversarial learning on multiple evaluation metrics. In particular, it performs particularly well in the accuracy of the first few recommended items, while maintaining high robustness and maintaining high recommendation accuracy.
Self-Supervised Graph Neural Networks for Enhanced Feature Extraction in Heterogeneous Information Networks
Oct 23, 2024This paper explores the applications and challenges of graph neural networks (GNNs) in processing complex graph data brought about by the rapid development of the Internet. Given the heterogeneity and redundancy problems that graph data often have, traditional GNN methods may be overly dependent on the initial structure and attribute information of the graph, which limits their ability to accurately simulate more complex relationships and patterns in the graph. Therefore, this study proposes a graph neural network model under a self-supervised learning framework, which can flexibly combine different types of additional information of the attribute graph and its nodes, so as to better mine the deep features in the graph data. By introducing a self-supervisory mechanism, it is expected to improve the adaptability of existing models to the diversity and complexity of graph data and improve the overall performance of the model.
A Recommendation Model Utilizing Separation Embedding and Self-Attention for Feature Mining
Oct 19, 2024



With the explosive growth of Internet data, users are facing the problem of information overload, which makes it a challenge to efficiently obtain the required resources. Recommendation systems have emerged in this context. By filtering massive amounts of information, they provide users with content that meets their needs, playing a key role in scenarios such as advertising recommendation and product recommendation. However, traditional click-through rate prediction and TOP-K recommendation mechanisms are gradually unable to meet the recommendations needs in modern life scenarios due to high computational complexity, large memory consumption, long feature selection time, and insufficient feature interaction. This paper proposes a recommendations system model based on a separation embedding cross-network. The model uses an embedding neural network layer to transform sparse feature vectors into dense embedding vectors, and can independently perform feature cross operations on different dimensions, thereby improving the accuracy and depth of feature mining. Experimental results show that the model shows stronger adaptability and higher prediction accuracy in processing complex data sets, effectively solving the problems existing in existing models.
Voxel-SLAM: A Complete, Accurate, and Versatile LiDAR-Inertial SLAM System
Oct 11, 2024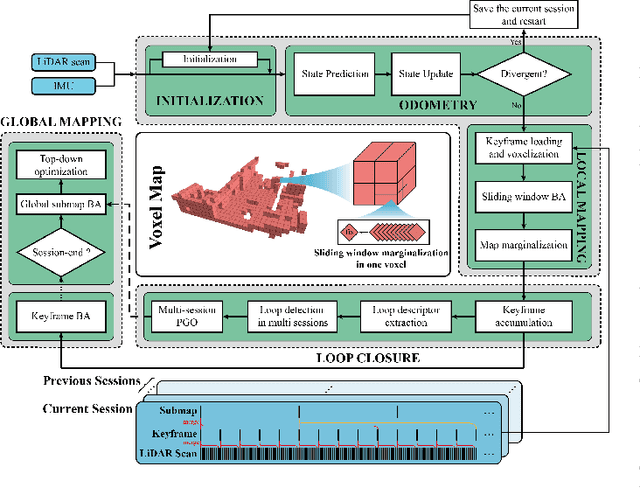
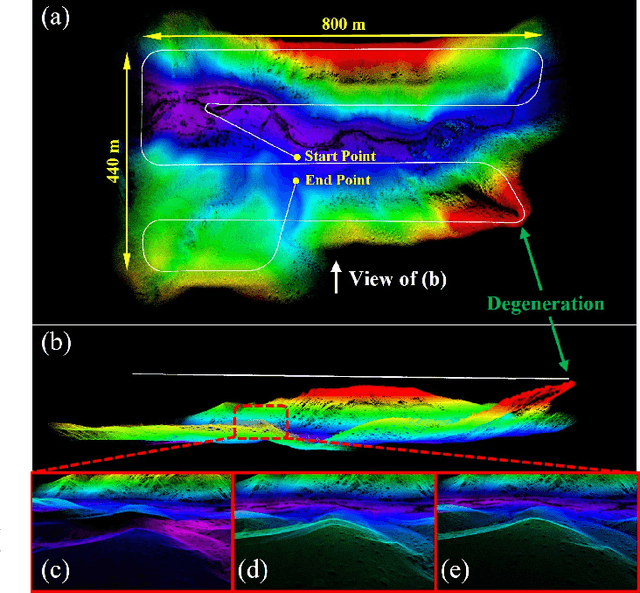
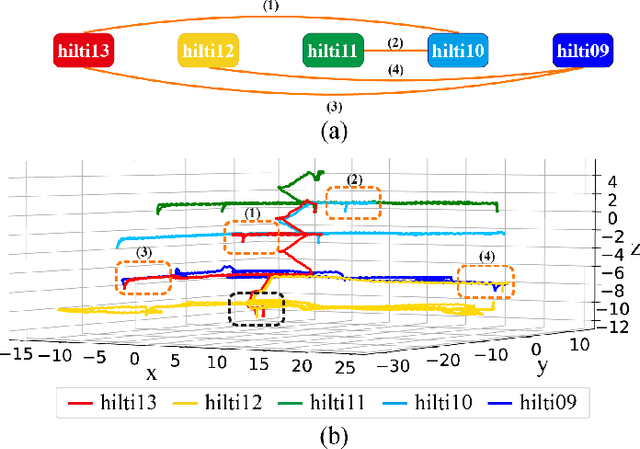
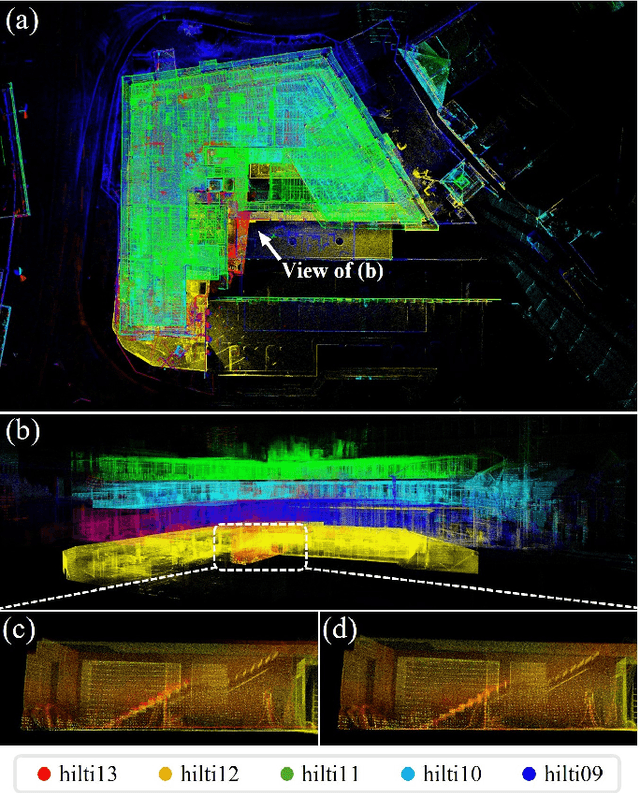
In this work, we present Voxel-SLAM: a complete, accurate, and versatile LiDAR-inertial SLAM system that fully utilizes short-term, mid-term, long-term, and multi-map data associations to achieve real-time estimation and high precision mapping. The system consists of five modules: initialization, odometry, local mapping, loop closure, and global mapping, all employing the same map representation, an adaptive voxel map. The initialization provides an accurate initial state estimation and a consistent local map for subsequent modules, enabling the system to start with a highly dynamic initial state. The odometry, exploiting the short-term data association, rapidly estimates current states and detects potential system divergence. The local mapping, exploiting the mid-term data association, employs a local LiDAR-inertial bundle adjustment (BA) to refine the states (and the local map) within a sliding window of recent LiDAR scans. The loop closure detects previously visited places in the current and all previous sessions. The global mapping refines the global map with an efficient hierarchical global BA. The loop closure and global mapping both exploit long-term and multi-map data associations. We conducted a comprehensive benchmark comparison with other state-of-the-art methods across 30 sequences from three representative scenes, including narrow indoor environments using hand-held equipment, large-scale wilderness environments with aerial robots, and urban environments on vehicle platforms. Other experiments demonstrate the robustness and efficiency of the initialization, the capacity to work in multiple sessions, and relocalization in degenerated environments.
Swarm-LIO2: Decentralized, Efficient LiDAR-inertial Odometry for UAV Swarms
Sep 26, 2024



Aerial swarm systems possess immense potential in various aspects, such as cooperative exploration, target tracking, search and rescue. Efficient, accurate self and mutual state estimation are the critical preconditions for completing these swarm tasks, which remain challenging research topics. This paper proposes Swarm-LIO2: a fully decentralized, plug-and-play, computationally efficient, and bandwidth-efficient LiDAR-inertial odometry for aerial swarm systems. Swarm-LIO2 uses a decentralized, plug-and-play network as the communication infrastructure. Only bandwidth-efficient and low-dimensional information is exchanged, including identity, ego-state, mutual observation measurements, and global extrinsic transformations. To support the plug-and-play of new teammate participants, Swarm-LIO2 detects potential teammate UAVs and initializes the temporal offset and global extrinsic transformation all automatically. To enhance the initialization efficiency, novel reflectivity-based UAV detection, trajectory matching, and factor graph optimization methods are proposed. For state estimation, Swarm-LIO2 fuses LiDAR, IMU, and mutual observation measurements within an efficient ESIKF framework, with careful compensation of temporal delay and modeling of measurements to enhance the accuracy and consistency.