 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Tail-Sitter Flights in Unknown Environments
Nov 26, 2024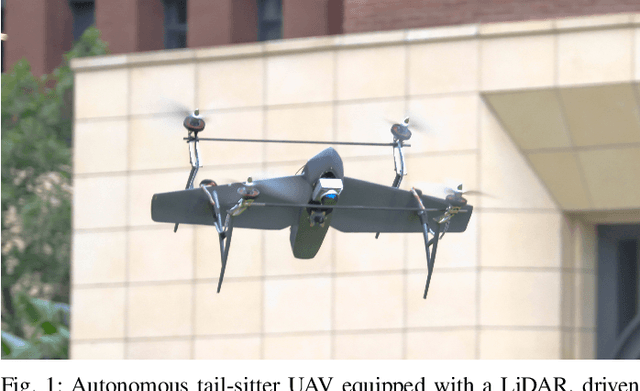

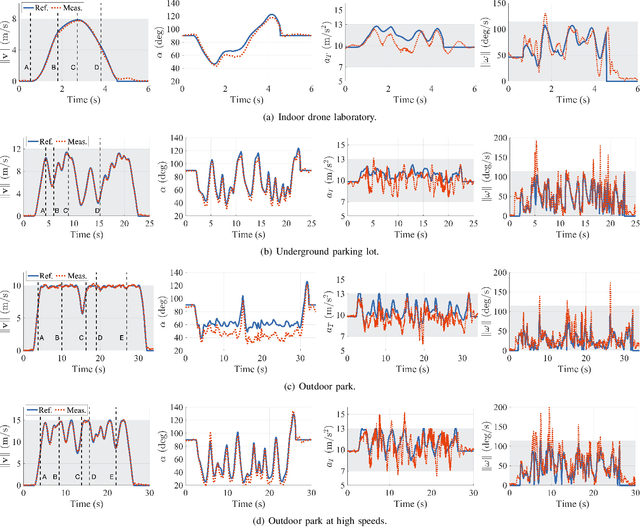

Trajectory generation for fully autonomous flights of tail-sitter unmanned aerial vehicles (UAVs) presents substantial challenges due to their highly nonlinear aerodynamics. In this paper, we introduce, to the best of our knowledge, the world's first fully autonomous tail-sitter UAV capable of high-speed navigation in unknown, cluttered environments. The UAV autonomy is enabled by cutting-edge technologies including LiDAR-based sensing, differential-flatness-based trajectory planning and control with purely onboard computation. In particular, we propose an optimization-based tail-sitter trajectory planning framework that generates high-speed, collision-free, and dynamically-feasible trajectories. To efficiently and reliably solve this nonlinear, constrained \textcolor{black}{problem}, we develop an efficient feasibility-assured solver, EFOPT, tailored for the online planning of tail-sitter UAVs. We conduct extensive simulation studies to benchmark EFOPT's superiority in planning tasks against conventional NLP solvers. We also demonstrate exhaustive experiments of aggressive autonomous flights with speeds up to 15m/s in various real-world environments, including indoor laboratories, underground parking lots, and outdoor parks. A video demonstration is available at https://youtu.be/OvqhlB2h3k8, and the EFOPT solver is open-sourced at https://github.com/hku-mars/EFOPT.
Swarm-LIO2: Decentralized, Efficient LiDAR-inertial Odometry for UAV Swarms
Sep 26, 2024



Aerial swarm systems possess immense potential in various aspects, such as cooperative exploration, target tracking, search and rescue. Efficient, accurate self and mutual state estimation are the critical preconditions for completing these swarm tasks, which remain challenging research topics. This paper proposes Swarm-LIO2: a fully decentralized, plug-and-play, computationally efficient, and bandwidth-efficient LiDAR-inertial odometry for aerial swarm systems. Swarm-LIO2 uses a decentralized, plug-and-play network as the communication infrastructure. Only bandwidth-efficient and low-dimensional information is exchanged, including identity, ego-state, mutual observation measurements, and global extrinsic transformations. To support the plug-and-play of new teammate participants, Swarm-LIO2 detects potential teammate UAVs and initializes the temporal offset and global extrinsic transformation all automatically. To enhance the initialization efficiency, novel reflectivity-based UAV detection, trajectory matching, and factor graph optimization methods are proposed. For state estimation, Swarm-LIO2 fuses LiDAR, IMU, and mutual observation measurements within an efficient ESIKF framework, with careful compensation of temporal delay and modeling of measurements to enhance the accuracy and consistency.