 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMAD: Mapping-Aware World Models for Agile Quadrotor Flight
Jun 03, 2026Agile quadrotor flight in cluttered scenes requires more than a reactive mapping from a depth image to a control command: the vehicle must remember which regions have been observed, infer nearby occupied space, and act under partial visibility and tight latency. In this paper, we present Mapping-Aware Dreamer (MAD), a geometry-aware world model for vision-based quadrotor flight. Instead of using raw-image reconstruction as the main self-supervised objective, MAD learns recurrent latent dynamics that reconstruct robocentric occupancy and visibility grid maps together with proprioceptive states. This design forces the latent state to encode local geometry, visibility history, and ego-motion in a form that is directly relevant to collision avoidance. MAD is trained in DiffAero using a GPU-parallel map-construction module that provides high-throughput supervision for occupancy and visibility. The learned representation is used in three policy-learning modes: imagination-based MAD-Dreamer and feature-extractor variants based on PPO and SHAC. Across visual navigation and racing tasks, MAD-based agents achieve higher success rates, faster flight, and better cross-task transfer than corresponding vision-only baselines. The model also produces interpretable map predictions and accurate ego-motion estimates from depth observations. We further deploy the learned policy on a physical quadrotor with an Intel RealSense D435i and demonstrate safe indoor and outdoor flight under limited sensing, reaching 9.66 m/s in simulation and 5.05 m/s in real-world forest experiments. These results show that mapping-aware world models provide a practical middle ground between modular aerial navigation and end-to-end learning.
Memory-Efficient Boundary Map for Large-Scale Occupancy Grid Mapping
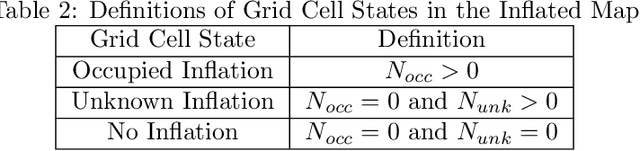
Mar 23, 2026Determining the occupancy status of locations in the environment is a fundamental task for safety-critical robotic applications. Traditional occupancy grid mapping methods subdivide the environment into a grid of voxels, each associated with one of three occupancy states: free, occupied, or unknown. These methods explicitly maintain all voxels within the mapped volume and determine the occupancy state of a location by directly querying the corresponding voxel that the location falls within. However, maintaining all grid voxels in high-resolution and large-scale scenarios requires substantial memory resources. In this paper, we introduce a novel representation that only maintains the boundary of the mapped volume. Specifically, we explicitly represent the boundary voxels, such as the occupied voxels and frontier voxels, while free and unknown voxels are automatically represented by volumes within or outside the boundary, respectively. As our representation maintains only a closed surface in two-dimensional (2D) space, instead of the entire volume in three-dimensional (3D) space, it significantly reduces memory consumption. Then, based on this 2D representation, we propose a method to determine the occupancy state of arbitrary locations in the 3D environment. We term this method as boundary map. Besides, we design a novel data structure for maintaining the boundary map, supporting efficient occupancy state queries. Theoretical analyses of the occupancy state query algorithm are also provided. Furthermore, to enable efficient construction and updates of the boundary map from the real-time sensor measurements, we propose a global-local mapping framework and corresponding update algorithms. Finally, we will make our implementation of the boundary map open-source on GitHub to benefit the community:https://github.com/hku-mars/BDM.
Learning Agile Quadrotor Flight in the Real World
Feb 10, 2026Learning-based controllers have achieved impressive performance in agile quadrotor flight but typically rely on massive training in simulation, necessitating accurate system identification for effective Sim2Real transfer. However, even with precise modeling, fixed policies remain susceptible to out-of-distribution scenarios, ranging from external aerodynamic disturbances to internal hardware degradation. To ensure safety under these evolving uncertainties, such controllers are forced to operate with conservative safety margins, inherently constraining their agility outside of controlled settings. While online adaptation offers a potential remedy, safely exploring physical limits remains a critical bottleneck due to data scarcity and safety risks. To bridge this gap, we propose a self-adaptive framework that eliminates the need for precise system identification or offline Sim2Real transfer. We introduce Adaptive Temporal Scaling (ATS) to actively explore platform physical limits, and employ online residual learning to augment a simple nominal model. {Based on the learned hybrid model, we further propose Real-world Anchored Short-horizon Backpropagation Through Time (RASH-BPTT) to achieve efficient and robust in-flight policy updates. Extensive experiments demonstrate that our quadrotor reliably executes agile maneuvers near actuator saturation limits. The system evolves a conservative base policy with a peak speed of 1.9 m/s to 7.3 m/s within approximately 100 seconds of flight time. These findings underscore that real-world adaptation serves not merely to compensate for modeling errors, but as a practical mechanism for sustained performance improvement in aggressive flight regimes.
Flying through cluttered and dynamic environments with LiDAR
Apr 24, 2025



Navigating unmanned aerial vehicles (UAVs) through cluttered and dynamic environments remains a significant challenge, particularly when dealing with fast-moving or sudden-appearing obstacles. This paper introduces a complete LiDAR-based system designed to enable UAVs to avoid various moving obstacles in complex environments. Benefiting the high computational efficiency of perception and planning, the system can operate in real time using onboard computing resources with low latency. For dynamic environment perception, we have integrated our previous work, M-detector, into the system. M-detector ensures that moving objects of different sizes, colors, and types are reliably detected. For dynamic environment planning, we incorporate dynamic object predictions into the integrated planning and control (IPC) framework, namely DynIPC. This integration allows the UAV to utilize predictions about dynamic obstacles to effectively evade them. We validate our proposed system through both simulations and real-world experiments. In simulation tests, our system outperforms state-of-the-art baselines across several metrics, including success rate, time consumption, average flight time, and maximum velocity. In real-world trials, our system successfully navigates through forests, avoiding moving obstacles along its path.
Autonomous Tail-Sitter Flights in Unknown Environments
Nov 26, 2024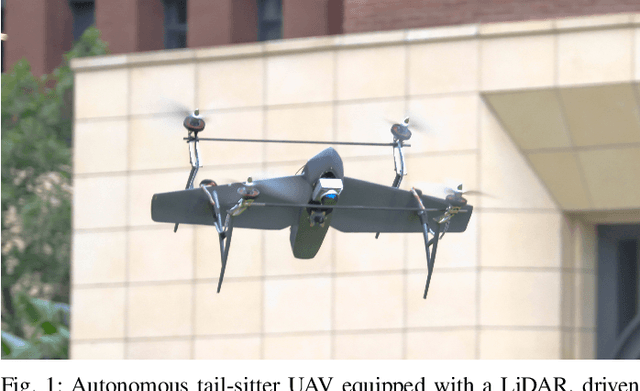

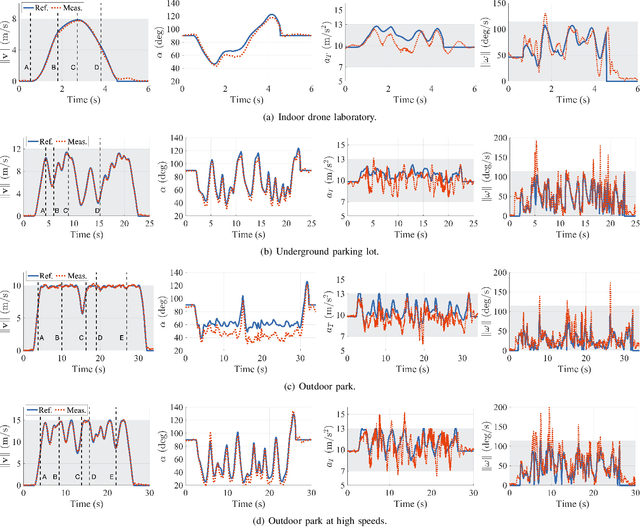

Trajectory generation for fully autonomous flights of tail-sitter unmanned aerial vehicles (UAVs) presents substantial challenges due to their highly nonlinear aerodynamics. In this paper, we introduce, to the best of our knowledge, the world's first fully autonomous tail-sitter UAV capable of high-speed navigation in unknown, cluttered environments. The UAV autonomy is enabled by cutting-edge technologies including LiDAR-based sensing, differential-flatness-based trajectory planning and control with purely onboard computation. In particular, we propose an optimization-based tail-sitter trajectory planning framework that generates high-speed, collision-free, and dynamically-feasible trajectories. To efficiently and reliably solve this nonlinear, constrained \textcolor{black}{problem}, we develop an efficient feasibility-assured solver, EFOPT, tailored for the online planning of tail-sitter UAVs. We conduct extensive simulation studies to benchmark EFOPT's superiority in planning tasks against conventional NLP solvers. We also demonstrate exhaustive experiments of aggressive autonomous flights with speeds up to 15m/s in various real-world environments, including indoor laboratories, underground parking lots, and outdoor parks. A video demonstration is available at https://youtu.be/OvqhlB2h3k8, and the EFOPT solver is open-sourced at https://github.com/hku-mars/EFOPT.
Swarm-LIO2: Decentralized, Efficient LiDAR-inertial Odometry for UAV Swarms
Sep 26, 2024



Aerial swarm systems possess immense potential in various aspects, such as cooperative exploration, target tracking, search and rescue. Efficient, accurate self and mutual state estimation are the critical preconditions for completing these swarm tasks, which remain challenging research topics. This paper proposes Swarm-LIO2: a fully decentralized, plug-and-play, computationally efficient, and bandwidth-efficient LiDAR-inertial odometry for aerial swarm systems. Swarm-LIO2 uses a decentralized, plug-and-play network as the communication infrastructure. Only bandwidth-efficient and low-dimensional information is exchanged, including identity, ego-state, mutual observation measurements, and global extrinsic transformations. To support the plug-and-play of new teammate participants, Swarm-LIO2 detects potential teammate UAVs and initializes the temporal offset and global extrinsic transformation all automatically. To enhance the initialization efficiency, novel reflectivity-based UAV detection, trajectory matching, and factor graph optimization methods are proposed. For state estimation, Swarm-LIO2 fuses LiDAR, IMU, and mutual observation measurements within an efficient ESIKF framework, with careful compensation of temporal delay and modeling of measurements to enhance the accuracy and consistency.
LiDAR-based Quadrotor for Slope Inspection in Dense Vegetation
Sep 21, 2024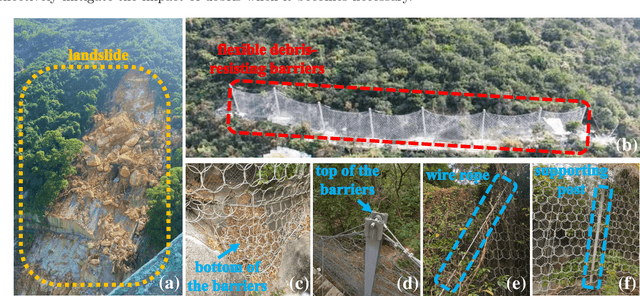
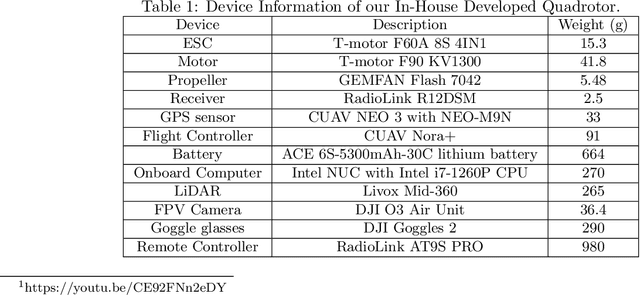
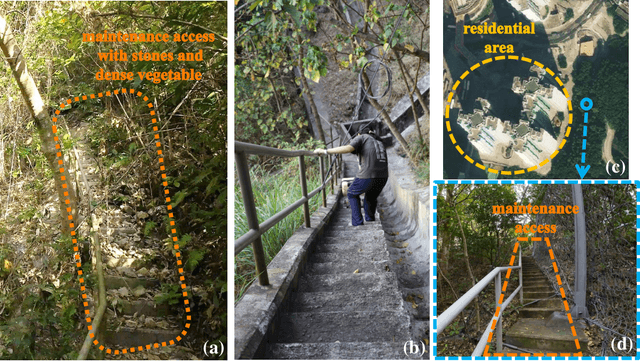
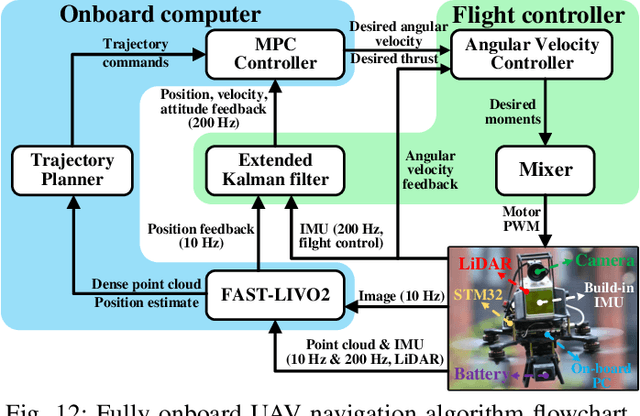
This work presents a LiDAR-based quadrotor system for slope inspection in dense vegetation environments. Cities like Hong Kong are vulnerable to climate hazards, which often result in landslides. To mitigate the landslide risks, the Civil Engineering and Development Department (CEDD) has constructed steel flexible debris-resisting barriers on vulnerable natural catchments to protect residents. However, it is necessary to carry out regular inspections to identify any anomalies, which may affect the proper functioning of the barriers. Traditional manual inspection methods face challenges and high costs due to steep terrain and dense vegetation. Compared to manual inspection, unmanned aerial vehicles (UAVs) equipped with LiDAR sensors and cameras have advantages such as maneuverability in complex terrain, and access to narrow areas and high spots. However, conducting slope inspections using UAVs in dense vegetation poses significant challenges. First, in terms of hardware, the overall design of the UAV must carefully consider its maneuverability in narrow spaces, flight time, and the types of onboard sensors required for effective inspection. Second, regarding software, navigation algorithms need to be designed to enable obstacle avoidance flight in dense vegetation environments. To overcome these challenges, we develop a LiDAR-based quadrotor, accompanied by a comprehensive software system. The goal is to deploy our quadrotor in field environments to achieve efficient slope inspection. To assess the feasibility of our hardware and software system, we conduct functional tests in non-operational scenarios. Subsequently, invited by CEDD, we deploy our quadrotor in six field environments, including five flexible debris-resisting barriers located in dense vegetation and one slope that experienced a landslide. These experiments demonstrated the superiority of our quadrotor in slope inspection.
FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry
Aug 26, 2024


This paper proposes FAST-LIVO2: a fast, direct LiDAR-inertial-visual odometry framework to achieve accurate and robust state estimation in SLAM tasks and provide great potential in real-time, onboard robotic applications. FAST-LIVO2 fuses the IMU, LiDAR and image measurements efficiently through an ESIKF. To address the dimension mismatch between the heterogeneous LiDAR and image measurements, we use a sequential update strategy in the Kalman filter. To enhance the efficiency, we use direct methods for both the visual and LiDAR fusion, where the LiDAR module registers raw points without extracting edge or plane features and the visual module minimizes direct photometric errors without extracting ORB or FAST corner features. The fusion of both visual and LiDAR measurements is based on a single unified voxel map where the LiDAR module constructs the geometric structure for registering new LiDAR scans and the visual module attaches image patches to the LiDAR points. To enhance the accuracy of image alignment, we use plane priors from the LiDAR points in the voxel map (and even refine the plane prior) and update the reference patch dynamically after new images are aligned. Furthermore, to enhance the robustness of image alignment, FAST-LIVO2 employs an on-demanding raycast operation and estimates the image exposure time in real time. Lastly, we detail three applications of FAST-LIVO2: UAV onboard navigation demonstrating the system's computation efficiency for real-time onboard navigation, airborne mapping showcasing the system's mapping accuracy, and 3D model rendering (mesh-based and NeRF-based) underscoring the suitability of our reconstructed dense map for subsequent rendering tasks. We open source our code, dataset and application on GitHub to benefit the robotics community.
Occupancy Grid Mapping without Ray-Casting for High-resolution LiDAR Sensors
Jul 17, 2023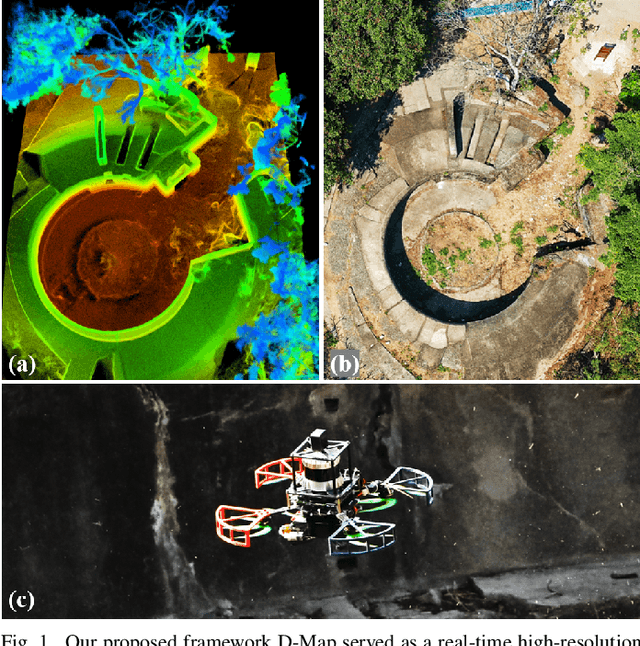
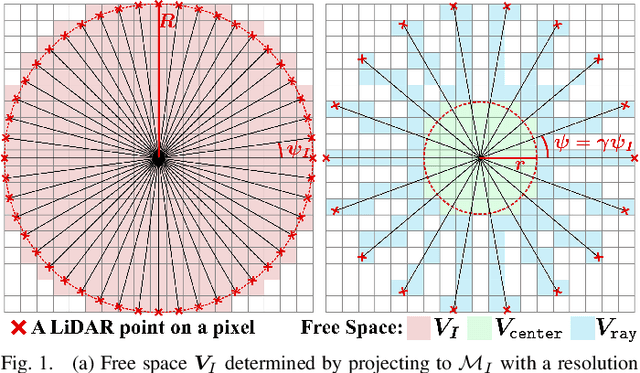
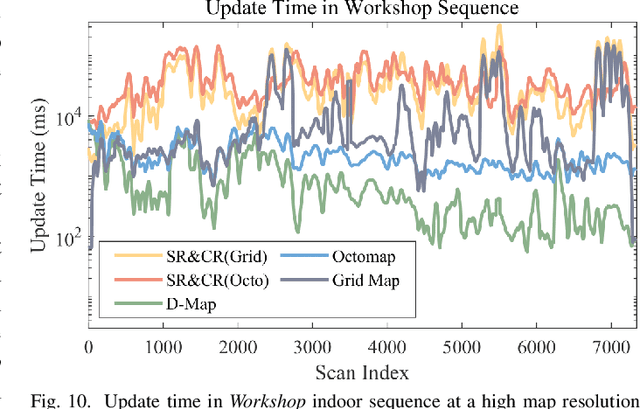
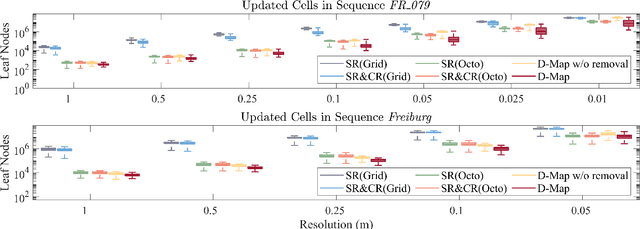
Occupancy mapping is a fundamental component of robotic systems to reason about the unknown and known regions of the environment. This article presents an efficient occupancy mapping framework for high-resolution LiDAR sensors, termed D-Map. The framework introduces three main novelties to address the computational efficiency challenges of occupancy mapping. Firstly, we use a depth image to determine the occupancy state of regions instead of the traditional ray-casting method. Secondly, we introduce an efficient on-tree update strategy on a tree-based map structure. These two techniques avoid redundant visits to small cells, significantly reducing the number of cells to be updated. Thirdly, we remove known cells from the map at each update by leveraging the low false alarm rate of LiDAR sensors. This approach not only enhances our framework's update efficiency by reducing map size but also endows it with an interesting decremental property, which we have named D-Map. To support our design, we provide theoretical analyses of the accuracy of the depth image projection and time complexity of occupancy updates. Furthermore, we conduct extensive benchmark experiments on various LiDAR sensors in both public and private datasets. Our framework demonstrates superior efficiency in comparison with other state-of-the-art methods while maintaining comparable mapping accuracy and high memory efficiency. We demonstrate two real-world applications of D-Map for real-time occupancy mapping on a handle device and an aerial platform carrying a high-resolution LiDAR. In addition, we open-source the implementation of D-Map on GitHub to benefit society: github.com/hku-mars/D-Map.
Perch a quadrotor on planes by the ceiling effect
Jul 03, 2023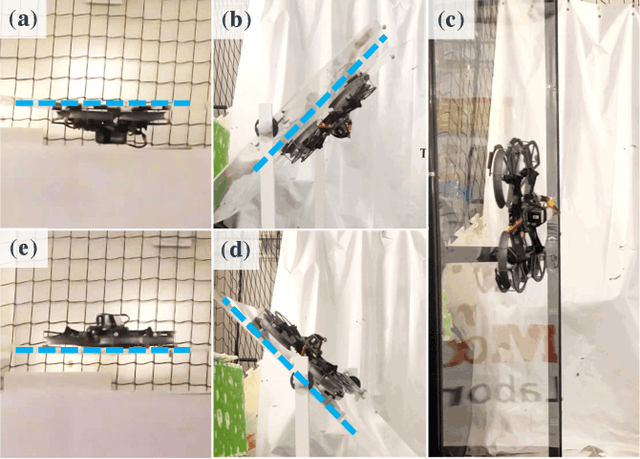
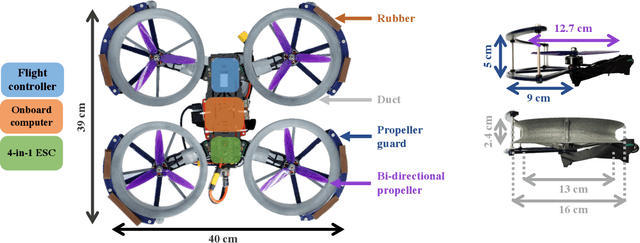
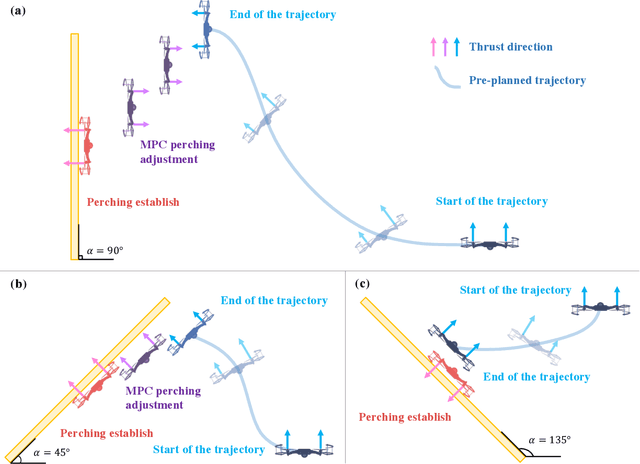
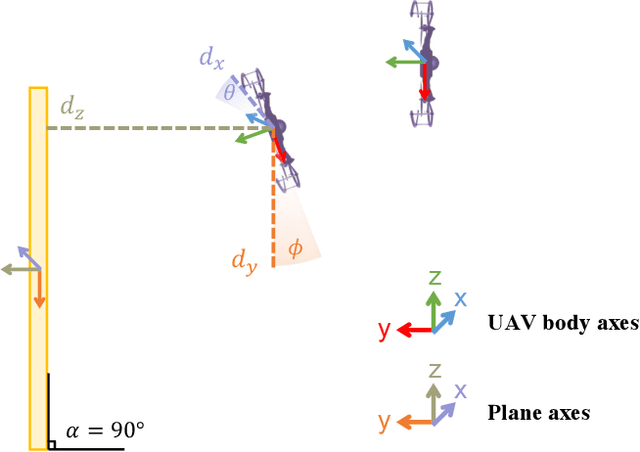
Perching is a promising solution for a small unmanned aerial vehicle (UAV) to save energy and extend operation time. This paper proposes a quadrotor that can perch on planar structures using the ceiling effect. Compared with the existing work, this perching method does not require any claws, hooks, or adhesive pads, leading to a simpler system design. This method does not limit the perching by surface angle or material either. The design of the quadrotor that only uses its propeller guards for surface contact is presented in this paper. We also discussed the automatic perching strategy including trajectory generation and power management. Experiments are conducted to verify that the approach is practical and the UAV can perch on planes with different angles. Energy consumption in the perching state is assessed, showing that more than 30% of power can be saved. Meanwhile, the quadrotor exhibits improved stability while perching compared to when it is hovering.