 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSwarm-LIO2: Decentralized, Efficient LiDAR-inertial Odometry for UAV Swarms
Sep 26, 2024



Aerial swarm systems possess immense potential in various aspects, such as cooperative exploration, target tracking, search and rescue. Efficient, accurate self and mutual state estimation are the critical preconditions for completing these swarm tasks, which remain challenging research topics. This paper proposes Swarm-LIO2: a fully decentralized, plug-and-play, computationally efficient, and bandwidth-efficient LiDAR-inertial odometry for aerial swarm systems. Swarm-LIO2 uses a decentralized, plug-and-play network as the communication infrastructure. Only bandwidth-efficient and low-dimensional information is exchanged, including identity, ego-state, mutual observation measurements, and global extrinsic transformations. To support the plug-and-play of new teammate participants, Swarm-LIO2 detects potential teammate UAVs and initializes the temporal offset and global extrinsic transformation all automatically. To enhance the initialization efficiency, novel reflectivity-based UAV detection, trajectory matching, and factor graph optimization methods are proposed. For state estimation, Swarm-LIO2 fuses LiDAR, IMU, and mutual observation measurements within an efficient ESIKF framework, with careful compensation of temporal delay and modeling of measurements to enhance the accuracy and consistency.
Replication of Impedance Identification Experiments on a Reinforcement-Learning-Controlled Digital Twin of Human Elbows
Feb 05, 2024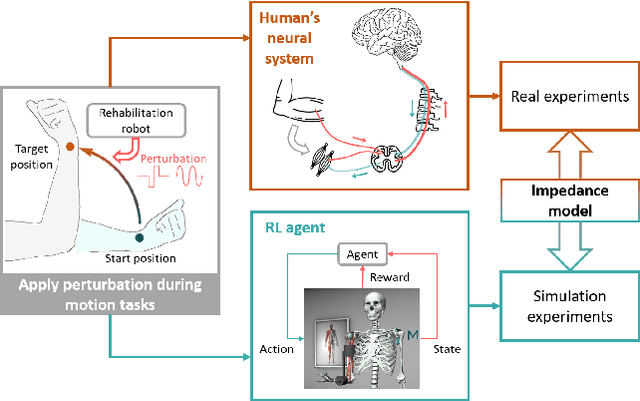
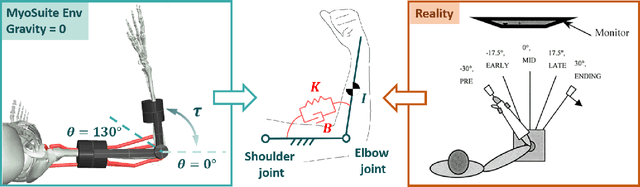
This study presents a pioneering effort to replicate human neuromechanical experiments within a virtual environment utilising a digital human model. By employing MyoSuite, a state-of-the-art human motion simulation platform enhanced by Reinforcement Learning (RL), multiple types of impedance identification experiments of human elbow were replicated on a musculoskeletal model. We compared the elbow movement controlled by an RL agent with the motion of an actual human elbow in terms of the impedance identified in torque-perturbation experiments. The findings reveal that the RL agent exhibits higher elbow impedance to stabilise the target elbow motion under perturbation than a human does, likely due to its shorter reaction time and superior sensory capabilities. This study serves as a preliminary exploration into the potential of virtual environment simulations for neuromechanical research, offering an initial yet promising alternative to conventional experimental approaches. An RL-controlled digital twin with complete musculoskeletal models of the human body is expected to be useful in designing experiments and validating rehabilitation theory before experiments on real human subjects.