 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMemory-Efficient Boundary Map for Large-Scale Occupancy Grid Mapping
Mar 23, 2026Determining the occupancy status of locations in the environment is a fundamental task for safety-critical robotic applications. Traditional occupancy grid mapping methods subdivide the environment into a grid of voxels, each associated with one of three occupancy states: free, occupied, or unknown. These methods explicitly maintain all voxels within the mapped volume and determine the occupancy state of a location by directly querying the corresponding voxel that the location falls within. However, maintaining all grid voxels in high-resolution and large-scale scenarios requires substantial memory resources. In this paper, we introduce a novel representation that only maintains the boundary of the mapped volume. Specifically, we explicitly represent the boundary voxels, such as the occupied voxels and frontier voxels, while free and unknown voxels are automatically represented by volumes within or outside the boundary, respectively. As our representation maintains only a closed surface in two-dimensional (2D) space, instead of the entire volume in three-dimensional (3D) space, it significantly reduces memory consumption. Then, based on this 2D representation, we propose a method to determine the occupancy state of arbitrary locations in the 3D environment. We term this method as boundary map. Besides, we design a novel data structure for maintaining the boundary map, supporting efficient occupancy state queries. Theoretical analyses of the occupancy state query algorithm are also provided. Furthermore, to enable efficient construction and updates of the boundary map from the real-time sensor measurements, we propose a global-local mapping framework and corresponding update algorithms. Finally, we will make our implementation of the boundary map open-source on GitHub to benefit the community:https://github.com/hku-mars/BDM.
Consistent and Efficient MSCKF-based LiDAR-Inertial Odometry with Inferred Cluster-to-Plane Constraints for UAVs
Mar 13, 2026Robust and accurate navigation is critical for Unmanned Aerial Vehicles (UAVs) especially for those with stringent Size, Weight, and Power (SWaP) constraints. However, most state-of-the-art (SOTA) LiDAR-Inertial Odometry (LIO) systems still suffer from estimation inconsistency and computational bottlenecks when deployed on such platforms. To address these issues, this paper proposes a consistent and efficient tightly-coupled LIO framework tailored for UAVs. Within the efficient Multi-State Constraint Kalman Filter (MSCKF) framework, we build coplanar constraints inferred from planar features observed across a sliding window. By applying null-space projection to sliding-window coplanar constraints, we eliminate the direct dependency on feature parameters in the state vector, thereby mitigating overconfidence and improving consistency. More importantly, to further boost the efficiency, we introduce a parallel voxel-based data association and a novel compact cluster-to-plane measurement model. This compact measurement model losslessly reduces observation dimensionality and significantly accelerating the update process. Extensive evaluations demonstrate that our method outperforms most state-of-the-art (SOTA) approaches by providing a superior balance of consistency and efficiency. It exhibits improved robustness in degenerate scenarios, achieves the lowest memory usage via its map-free nature, and runs in real-time on resource-constrained embedded platforms (e.g., NVIDIA Jetson TX2).
Flying through cluttered and dynamic environments with LiDAR
Apr 24, 2025



Navigating unmanned aerial vehicles (UAVs) through cluttered and dynamic environments remains a significant challenge, particularly when dealing with fast-moving or sudden-appearing obstacles. This paper introduces a complete LiDAR-based system designed to enable UAVs to avoid various moving obstacles in complex environments. Benefiting the high computational efficiency of perception and planning, the system can operate in real time using onboard computing resources with low latency. For dynamic environment perception, we have integrated our previous work, M-detector, into the system. M-detector ensures that moving objects of different sizes, colors, and types are reliably detected. For dynamic environment planning, we incorporate dynamic object predictions into the integrated planning and control (IPC) framework, namely DynIPC. This integration allows the UAV to utilize predictions about dynamic obstacles to effectively evade them. We validate our proposed system through both simulations and real-world experiments. In simulation tests, our system outperforms state-of-the-art baselines across several metrics, including success rate, time consumption, average flight time, and maximum velocity. In real-world trials, our system successfully navigates through forests, avoiding moving obstacles along its path.
LiDAR-based Quadrotor Autonomous Inspection System in Cluttered Environments
Mar 29, 2025In recent years, autonomous unmanned aerial vehicle (UAV) technology has seen rapid advancements, significantly improving operational efficiency and mitigating risks associated with manual tasks in domains such as industrial inspection, agricultural monitoring, and search-and-rescue missions. Despite these developments, existing UAV inspection systems encounter two critical challenges: limited reliability in complex, unstructured, and GNSS-denied environments, and a pronounced dependency on skilled operators. To overcome these limitations, this study presents a LiDAR-based UAV inspection system employing a dual-phase workflow: human-in-the-loop inspection and autonomous inspection. During the human-in-the-loop phase, untrained pilots are supported by autonomous obstacle avoidance, enabling them to generate 3D maps, specify inspection points, and schedule tasks. Inspection points are then optimized using the Traveling Salesman Problem (TSP) to create efficient task sequences. In the autonomous phase, the quadrotor autonomously executes the planned tasks, ensuring safe and efficient data acquisition. Comprehensive field experiments conducted in various environments, including slopes, landslides, agricultural fields, factories, and forests, confirm the system's reliability and flexibility. Results reveal significant enhancements in inspection efficiency, with autonomous operations reducing trajectory length by up to 40\% and flight time by 57\% compared to human-in-the-loop operations. These findings underscore the potential of the proposed system to enhance UAV-based inspections in safety-critical and resource-constrained scenarios.
FAST-LIVO2 on Resource-Constrained Platforms: LiDAR-Inertial-Visual Odometry with Efficient Memory and Computation
Jan 23, 2025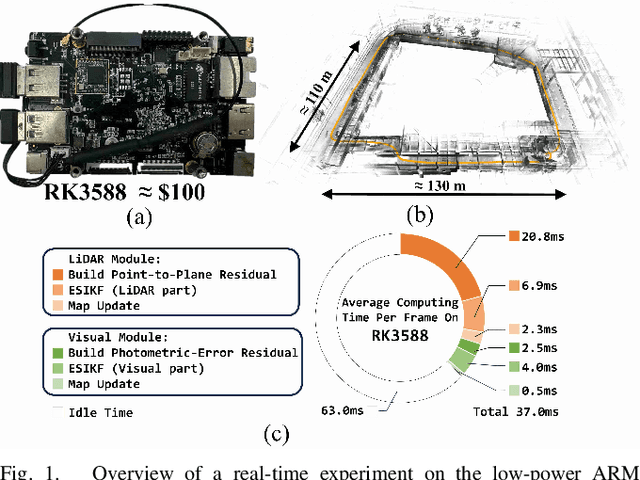
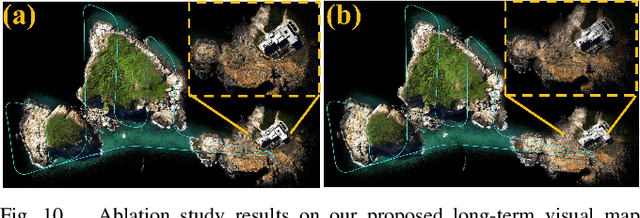
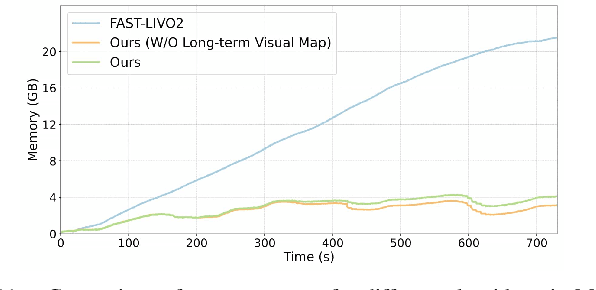
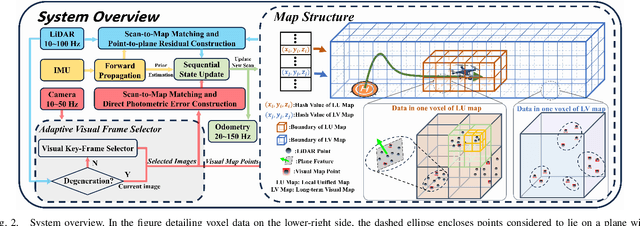
This paper presents a lightweight LiDAR-inertial-visual odometry system optimized for resource-constrained platforms. It integrates a degeneration-aware adaptive visual frame selector into error-state iterated Kalman filter (ESIKF) with sequential updates, improving computation efficiency significantly while maintaining a similar level of robustness. Additionally, a memory-efficient mapping structure combining a locally unified visual-LiDAR map and a long-term visual map achieves a good trade-off between performance and memory usage. Extensive experiments on x86 and ARM platforms demonstrate the system's robustness and efficiency. On the Hilti dataset, our system achieves a 33% reduction in per-frame runtime and 47% lower memory usage compared to FAST-LIVO2, with only a 3 cm increase in RMSE. Despite this slight accuracy trade-off, our system remains competitive, outperforming state-of-the-art (SOTA) LIO methods such as FAST-LIO2 and most existing LIVO systems. These results validate the system's capability for scalable deployment on resource-constrained edge computing platforms.
Autonomous Tail-Sitter Flights in Unknown Environments
Nov 26, 2024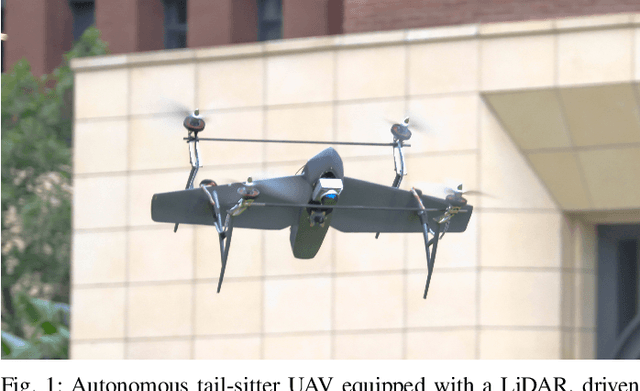

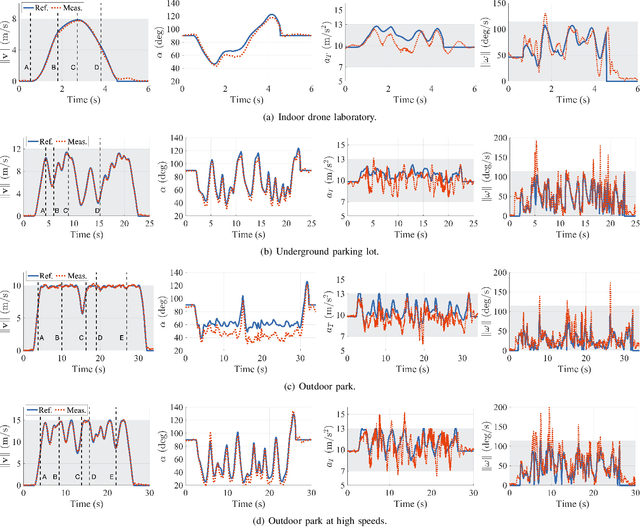

Trajectory generation for fully autonomous flights of tail-sitter unmanned aerial vehicles (UAVs) presents substantial challenges due to their highly nonlinear aerodynamics. In this paper, we introduce, to the best of our knowledge, the world's first fully autonomous tail-sitter UAV capable of high-speed navigation in unknown, cluttered environments. The UAV autonomy is enabled by cutting-edge technologies including LiDAR-based sensing, differential-flatness-based trajectory planning and control with purely onboard computation. In particular, we propose an optimization-based tail-sitter trajectory planning framework that generates high-speed, collision-free, and dynamically-feasible trajectories. To efficiently and reliably solve this nonlinear, constrained \textcolor{black}{problem}, we develop an efficient feasibility-assured solver, EFOPT, tailored for the online planning of tail-sitter UAVs. We conduct extensive simulation studies to benchmark EFOPT's superiority in planning tasks against conventional NLP solvers. We also demonstrate exhaustive experiments of aggressive autonomous flights with speeds up to 15m/s in various real-world environments, including indoor laboratories, underground parking lots, and outdoor parks. A video demonstration is available at https://youtu.be/OvqhlB2h3k8, and the EFOPT solver is open-sourced at https://github.com/hku-mars/EFOPT.
Swarm-LIO2: Decentralized, Efficient LiDAR-inertial Odometry for UAV Swarms
Sep 26, 2024



Aerial swarm systems possess immense potential in various aspects, such as cooperative exploration, target tracking, search and rescue. Efficient, accurate self and mutual state estimation are the critical preconditions for completing these swarm tasks, which remain challenging research topics. This paper proposes Swarm-LIO2: a fully decentralized, plug-and-play, computationally efficient, and bandwidth-efficient LiDAR-inertial odometry for aerial swarm systems. Swarm-LIO2 uses a decentralized, plug-and-play network as the communication infrastructure. Only bandwidth-efficient and low-dimensional information is exchanged, including identity, ego-state, mutual observation measurements, and global extrinsic transformations. To support the plug-and-play of new teammate participants, Swarm-LIO2 detects potential teammate UAVs and initializes the temporal offset and global extrinsic transformation all automatically. To enhance the initialization efficiency, novel reflectivity-based UAV detection, trajectory matching, and factor graph optimization methods are proposed. For state estimation, Swarm-LIO2 fuses LiDAR, IMU, and mutual observation measurements within an efficient ESIKF framework, with careful compensation of temporal delay and modeling of measurements to enhance the accuracy and consistency.
LiDAR-based Quadrotor for Slope Inspection in Dense Vegetation
Sep 21, 2024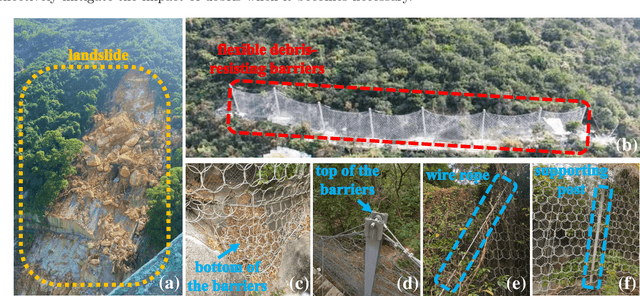
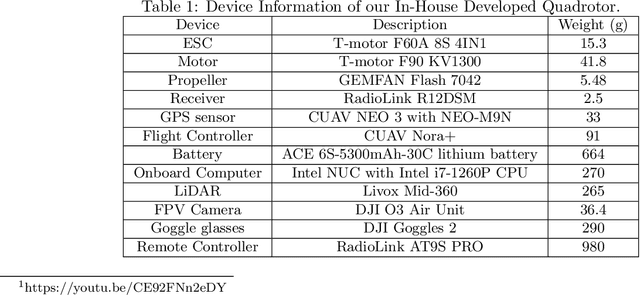
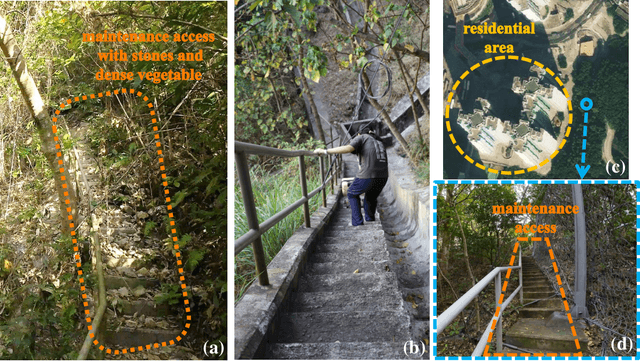
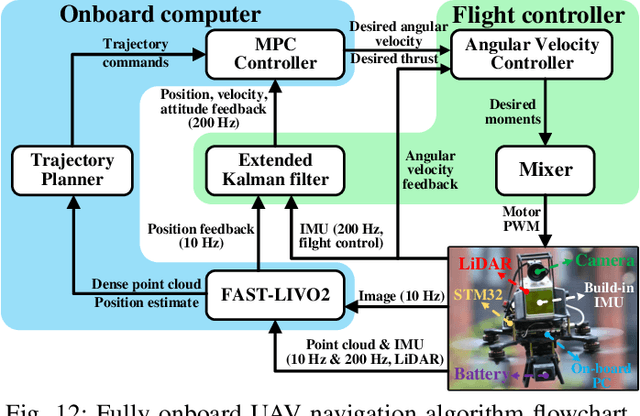
This work presents a LiDAR-based quadrotor system for slope inspection in dense vegetation environments. Cities like Hong Kong are vulnerable to climate hazards, which often result in landslides. To mitigate the landslide risks, the Civil Engineering and Development Department (CEDD) has constructed steel flexible debris-resisting barriers on vulnerable natural catchments to protect residents. However, it is necessary to carry out regular inspections to identify any anomalies, which may affect the proper functioning of the barriers. Traditional manual inspection methods face challenges and high costs due to steep terrain and dense vegetation. Compared to manual inspection, unmanned aerial vehicles (UAVs) equipped with LiDAR sensors and cameras have advantages such as maneuverability in complex terrain, and access to narrow areas and high spots. However, conducting slope inspections using UAVs in dense vegetation poses significant challenges. First, in terms of hardware, the overall design of the UAV must carefully consider its maneuverability in narrow spaces, flight time, and the types of onboard sensors required for effective inspection. Second, regarding software, navigation algorithms need to be designed to enable obstacle avoidance flight in dense vegetation environments. To overcome these challenges, we develop a LiDAR-based quadrotor, accompanied by a comprehensive software system. The goal is to deploy our quadrotor in field environments to achieve efficient slope inspection. To assess the feasibility of our hardware and software system, we conduct functional tests in non-operational scenarios. Subsequently, invited by CEDD, we deploy our quadrotor in six field environments, including five flexible debris-resisting barriers located in dense vegetation and one slope that experienced a landslide. These experiments demonstrated the superiority of our quadrotor in slope inspection.
FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry
Aug 26, 2024


This paper proposes FAST-LIVO2: a fast, direct LiDAR-inertial-visual odometry framework to achieve accurate and robust state estimation in SLAM tasks and provide great potential in real-time, onboard robotic applications. FAST-LIVO2 fuses the IMU, LiDAR and image measurements efficiently through an ESIKF. To address the dimension mismatch between the heterogeneous LiDAR and image measurements, we use a sequential update strategy in the Kalman filter. To enhance the efficiency, we use direct methods for both the visual and LiDAR fusion, where the LiDAR module registers raw points without extracting edge or plane features and the visual module minimizes direct photometric errors without extracting ORB or FAST corner features. The fusion of both visual and LiDAR measurements is based on a single unified voxel map where the LiDAR module constructs the geometric structure for registering new LiDAR scans and the visual module attaches image patches to the LiDAR points. To enhance the accuracy of image alignment, we use plane priors from the LiDAR points in the voxel map (and even refine the plane prior) and update the reference patch dynamically after new images are aligned. Furthermore, to enhance the robustness of image alignment, FAST-LIVO2 employs an on-demanding raycast operation and estimates the image exposure time in real time. Lastly, we detail three applications of FAST-LIVO2: UAV onboard navigation demonstrating the system's computation efficiency for real-time onboard navigation, airborne mapping showcasing the system's mapping accuracy, and 3D model rendering (mesh-based and NeRF-based) underscoring the suitability of our reconstructed dense map for subsequent rendering tasks. We open source our code, dataset and application on GitHub to benefit the robotics community.
Swashplateless-elevon Actuation for a Dual-rotor Tail-sitter VTOL UAV
Sep 24, 2023



In this paper, we propose a novel swashplateless-elevon actuation (SEA) for dual-rotor tail-sitter vertical takeoff and landing (VTOL) unmanned aerial vehicles (UAVs). In contrast to the conventional elevon actuation (CEA) which controls both pitch and yaw using elevons, the SEA adopts swashplateless mechanisms to generate an extra moment through motor speed modulation to control pitch and uses elevons solely for controlling yaw, without requiring additional actuators. This decoupled control strategy mitigates the saturation of elevons' deflection needed for large pitch and yaw control actions, thus improving the UAV's control performance on trajectory tracking and disturbance rejection performance in the presence of large external disturbances. Furthermore, the SEA overcomes the actuation degradation issues experienced by the CEA when the UAV is in close proximity to the ground, leading to a smoother and more stable take-off process. We validate and compare the performances of the SEA and the CEA in various real-world flight conditions, including take-off, trajectory tracking, and hover flight and position steps under external disturbance. Experimental results demonstrate that the SEA has better performances than the CEA. Moreover, we verify the SEA's feasibility in the attitude transition process and fixed-wing-mode flight of the VTOL UAV. The results indicate that the SEA can accurately control pitch in the presence of high-speed incoming airflow and maintain a stable attitude during fixed-wing mode flight. Video of all experiments can be found in youtube.com/watch?v=Sx9Rk4Zf7sQ