 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiDAR-based Quadrotor Autonomous Inspection System in Cluttered Environments
Mar 29, 2025In recent years, autonomous unmanned aerial vehicle (UAV) technology has seen rapid advancements, significantly improving operational efficiency and mitigating risks associated with manual tasks in domains such as industrial inspection, agricultural monitoring, and search-and-rescue missions. Despite these developments, existing UAV inspection systems encounter two critical challenges: limited reliability in complex, unstructured, and GNSS-denied environments, and a pronounced dependency on skilled operators. To overcome these limitations, this study presents a LiDAR-based UAV inspection system employing a dual-phase workflow: human-in-the-loop inspection and autonomous inspection. During the human-in-the-loop phase, untrained pilots are supported by autonomous obstacle avoidance, enabling them to generate 3D maps, specify inspection points, and schedule tasks. Inspection points are then optimized using the Traveling Salesman Problem (TSP) to create efficient task sequences. In the autonomous phase, the quadrotor autonomously executes the planned tasks, ensuring safe and efficient data acquisition. Comprehensive field experiments conducted in various environments, including slopes, landslides, agricultural fields, factories, and forests, confirm the system's reliability and flexibility. Results reveal significant enhancements in inspection efficiency, with autonomous operations reducing trajectory length by up to 40\% and flight time by 57\% compared to human-in-the-loop operations. These findings underscore the potential of the proposed system to enhance UAV-based inspections in safety-critical and resource-constrained scenarios.
LiDAR-based Quadrotor for Slope Inspection in Dense Vegetation
Sep 21, 2024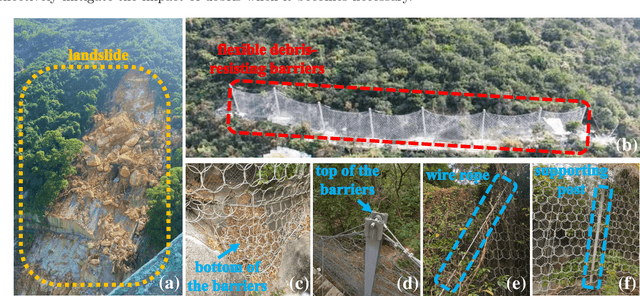
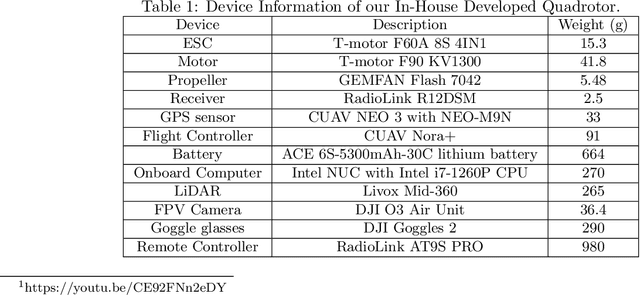
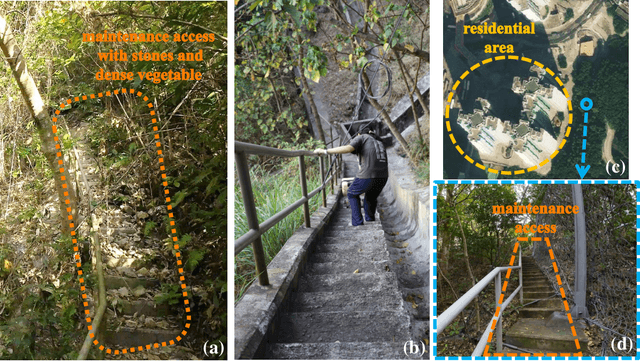
This work presents a LiDAR-based quadrotor system for slope inspection in dense vegetation environments. Cities like Hong Kong are vulnerable to climate hazards, which often result in landslides. To mitigate the landslide risks, the Civil Engineering and Development Department (CEDD) has constructed steel flexible debris-resisting barriers on vulnerable natural catchments to protect residents. However, it is necessary to carry out regular inspections to identify any anomalies, which may affect the proper functioning of the barriers. Traditional manual inspection methods face challenges and high costs due to steep terrain and dense vegetation. Compared to manual inspection, unmanned aerial vehicles (UAVs) equipped with LiDAR sensors and cameras have advantages such as maneuverability in complex terrain, and access to narrow areas and high spots. However, conducting slope inspections using UAVs in dense vegetation poses significant challenges. First, in terms of hardware, the overall design of the UAV must carefully consider its maneuverability in narrow spaces, flight time, and the types of onboard sensors required for effective inspection. Second, regarding software, navigation algorithms need to be designed to enable obstacle avoidance flight in dense vegetation environments. To overcome these challenges, we develop a LiDAR-based quadrotor, accompanied by a comprehensive software system. The goal is to deploy our quadrotor in field environments to achieve efficient slope inspection. To assess the feasibility of our hardware and software system, we conduct functional tests in non-operational scenarios. Subsequently, invited by CEDD, we deploy our quadrotor in six field environments, including five flexible debris-resisting barriers located in dense vegetation and one slope that experienced a landslide. These experiments demonstrated the superiority of our quadrotor in slope inspection.
Perch a quadrotor on planes by the ceiling effect
Jul 03, 2023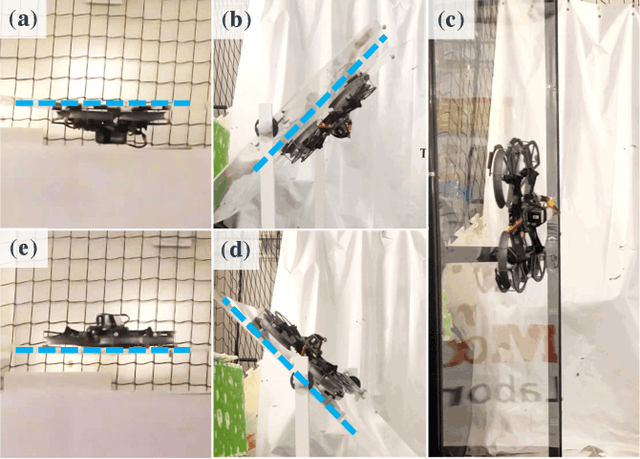
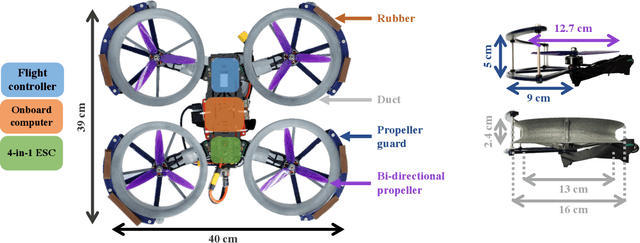
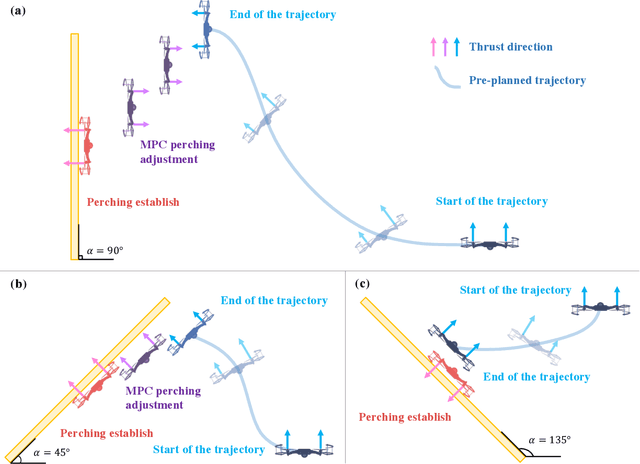
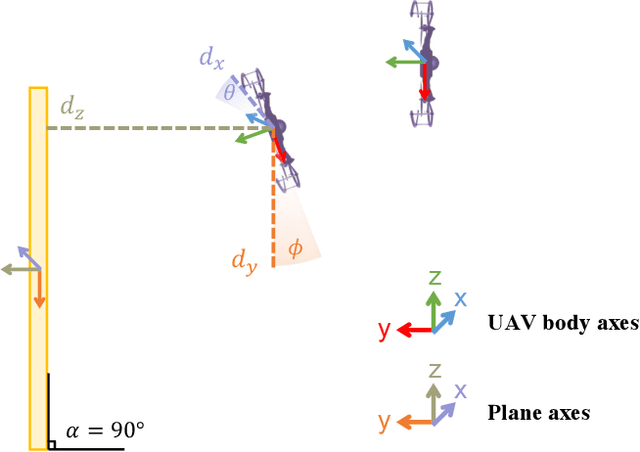
Perching is a promising solution for a small unmanned aerial vehicle (UAV) to save energy and extend operation time. This paper proposes a quadrotor that can perch on planar structures using the ceiling effect. Compared with the existing work, this perching method does not require any claws, hooks, or adhesive pads, leading to a simpler system design. This method does not limit the perching by surface angle or material either. The design of the quadrotor that only uses its propeller guards for surface contact is presented in this paper. We also discussed the automatic perching strategy including trajectory generation and power management. Experiments are conducted to verify that the approach is practical and the UAV can perch on planes with different angles. Energy consumption in the perching state is assessed, showing that more than 30% of power can be saved. Meanwhile, the quadrotor exhibits improved stability while perching compared to when it is hovering.
ImMesh: An Immediate LiDAR Localization and Meshing Framework
Jan 12, 2023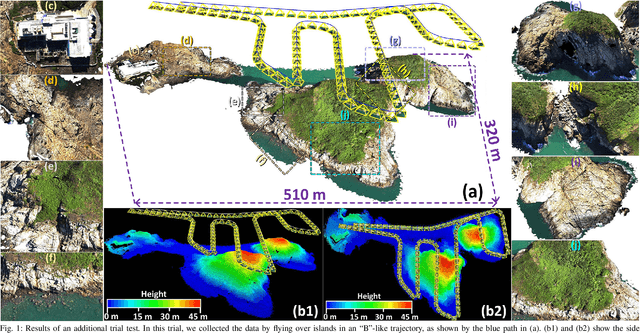
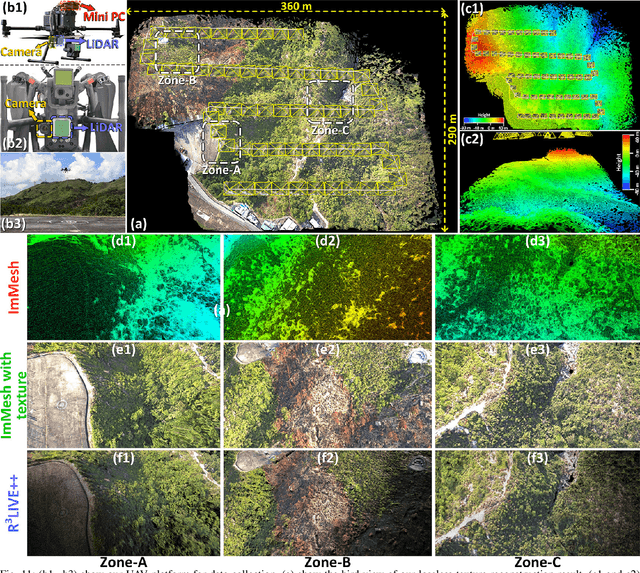

In this paper, we propose a novel LiDAR(-inertial) odometry and mapping framework to achieve the goal of simultaneous localization and meshing in real-time. This proposed framework termed ImMesh comprises four tightly-coupled modules: receiver, localization, meshing, and broadcaster. The localization module utilizes the prepossessed sensor data from the receiver, estimates the sensor pose online by registering LiDAR scans to maps, and dynamically grows the map. Then, our meshing module takes the registered LiDAR scan for incrementally reconstructing the triangle mesh on the fly. Finally, the real-time odometry, map, and mesh are published via our broadcaster. The key contribution of this work is the meshing module, which represents a scene by an efficient hierarchical voxels structure, performs fast finding of voxels observed by new scans, and reconstructs triangle facets in each voxel in an incremental manner. This voxel-wise meshing operation is delicately designed for the purpose of efficiency; it first performs a dimension reduction by projecting 3D points to a 2D local plane contained in the voxel, and then executes the meshing operation with pull, commit and push steps for incremental reconstruction of triangle facets. To the best of our knowledge, this is the first work in literature that can reconstruct online the triangle mesh of large-scale scenes, just relying on a standard CPU without GPU acceleration. To share our findings and make contributions to the community, we make our code publicly available on our GitHub: https://github.com/hku-mars/ImMesh.