 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiDAR-based Quadrotor for Slope Inspection in Dense Vegetation
Paper and Code
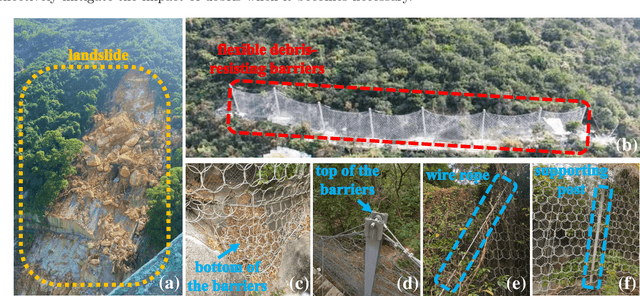
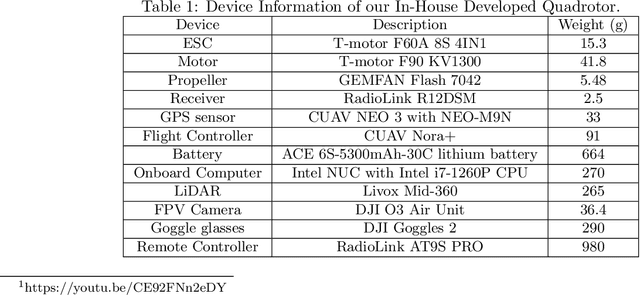
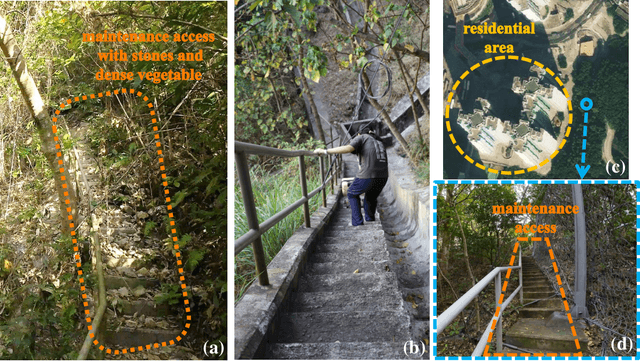
This work presents a LiDAR-based quadrotor system for slope inspection in dense vegetation environments. Cities like Hong Kong are vulnerable to climate hazards, which often result in landslides. To mitigate the landslide risks, the Civil Engineering and Development Department (CEDD) has constructed steel flexible debris-resisting barriers on vulnerable natural catchments to protect residents. However, it is necessary to carry out regular inspections to identify any anomalies, which may affect the proper functioning of the barriers. Traditional manual inspection methods face challenges and high costs due to steep terrain and dense vegetation. Compared to manual inspection, unmanned aerial vehicles (UAVs) equipped with LiDAR sensors and cameras have advantages such as maneuverability in complex terrain, and access to narrow areas and high spots. However, conducting slope inspections using UAVs in dense vegetation poses significant challenges. First, in terms of hardware, the overall design of the UAV must carefully consider its maneuverability in narrow spaces, flight time, and the types of onboard sensors required for effective inspection. Second, regarding software, navigation algorithms need to be designed to enable obstacle avoidance flight in dense vegetation environments. To overcome these challenges, we develop a LiDAR-based quadrotor, accompanied by a comprehensive software system. The goal is to deploy our quadrotor in field environments to achieve efficient slope inspection. To assess the feasibility of our hardware and software system, we conduct functional tests in non-operational scenarios. Subsequently, invited by CEDD, we deploy our quadrotor in six field environments, including five flexible debris-resisting barriers located in dense vegetation and one slope that experienced a landslide. These experiments demonstrated the superiority of our quadrotor in slope inspection.