 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerch a quadrotor on planes by the ceiling effect
Jul 03, 2023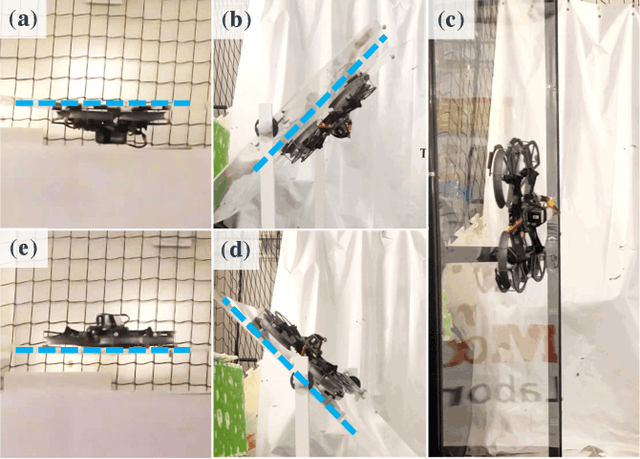
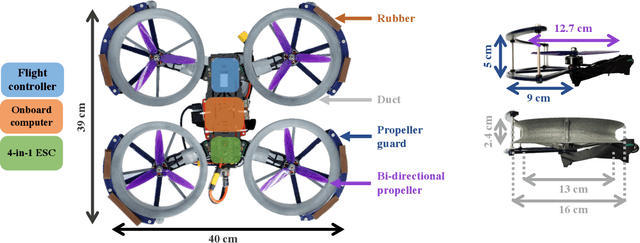
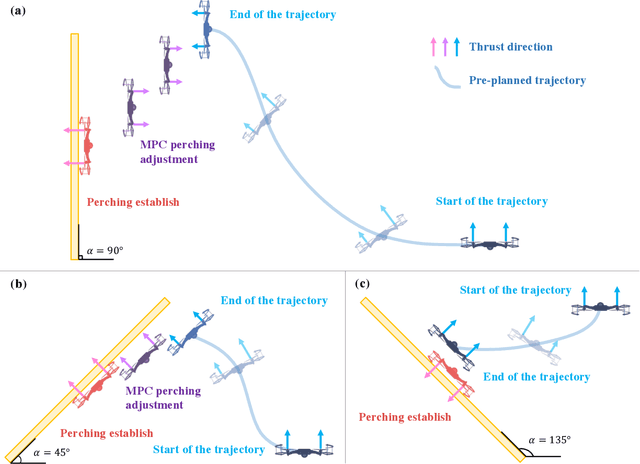
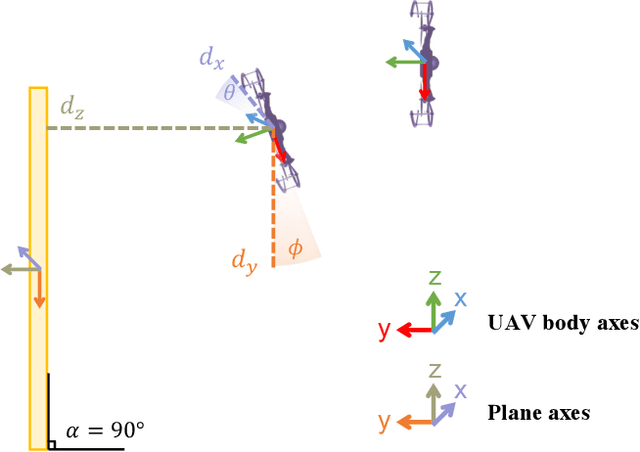
Perching is a promising solution for a small unmanned aerial vehicle (UAV) to save energy and extend operation time. This paper proposes a quadrotor that can perch on planar structures using the ceiling effect. Compared with the existing work, this perching method does not require any claws, hooks, or adhesive pads, leading to a simpler system design. This method does not limit the perching by surface angle or material either. The design of the quadrotor that only uses its propeller guards for surface contact is presented in this paper. We also discussed the automatic perching strategy including trajectory generation and power management. Experiments are conducted to verify that the approach is practical and the UAV can perch on planes with different angles. Energy consumption in the perching state is assessed, showing that more than 30% of power can be saved. Meanwhile, the quadrotor exhibits improved stability while perching compared to when it is hovering.