 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFAST-Calib: LiDAR-Camera Extrinsic Calibration in One Second
Jul 23, 2025This paper proposes FAST-Calib, a fast and user-friendly LiDAR-camera extrinsic calibration tool based on a custom-made 3D target. FAST-Calib supports both mechanical and solid-state LiDARs by leveraging an efficient and reliable edge extraction algorithm that is agnostic to LiDAR scan patterns. It also compensates for edge dilation artifacts caused by LiDAR spot spread through ellipse fitting, and supports joint optimization across multiple scenes. We validate FAST-Calib on three LiDAR models (Ouster, Avia, and Mid360), each paired with a wide-angle camera. Experimental results demonstrate superior accuracy and robustness compared to existing methods. With point-to-point registration errors consistently below 6.5mm and total processing time under 0.7s, FAST-Calib provides an efficient, accurate, and target-based automatic calibration pipeline. We have open-sourced our code and dataset on GitHub to benefit the robotics community.
GS-SDF: LiDAR-Augmented Gaussian Splatting and Neural SDF for Geometrically Consistent Rendering and Reconstruction
Mar 13, 2025Digital twins are fundamental to the development of autonomous driving and embodied artificial intelligence. However, achieving high-granularity surface reconstruction and high-fidelity rendering remains a challenge. Gaussian splatting offers efficient photorealistic rendering but struggles with geometric inconsistencies due to fragmented primitives and sparse observational data in robotics applications. Existing regularization methods, which rely on render-derived constraints, often fail in complex environments. Moreover, effectively integrating sparse LiDAR data with Gaussian splatting remains challenging. We propose a unified LiDAR-visual system that synergizes Gaussian splatting with a neural signed distance field. The accurate LiDAR point clouds enable a trained neural signed distance field to offer a manifold geometry field, This motivates us to offer an SDF-based Gaussian initialization for physically grounded primitive placement and a comprehensive geometric regularization for geometrically consistent rendering and reconstruction. Experiments demonstrate superior reconstruction accuracy and rendering quality across diverse trajectories. To benefit the community, the codes will be released at https://github.com/hku-mars/GS-SDF.
FAST-LIVO2 on Resource-Constrained Platforms: LiDAR-Inertial-Visual Odometry with Efficient Memory and Computation
Jan 23, 2025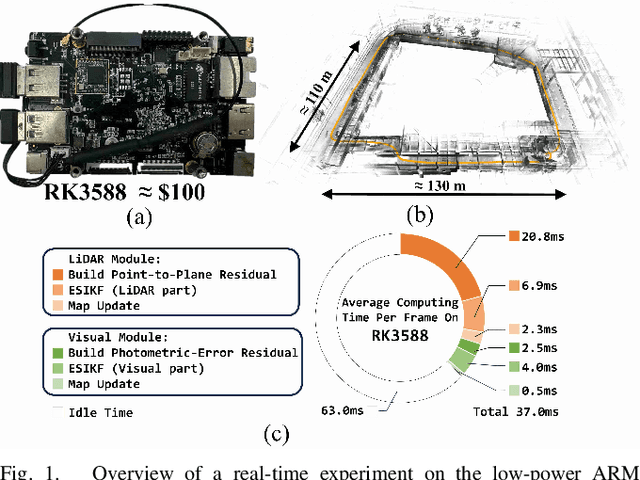
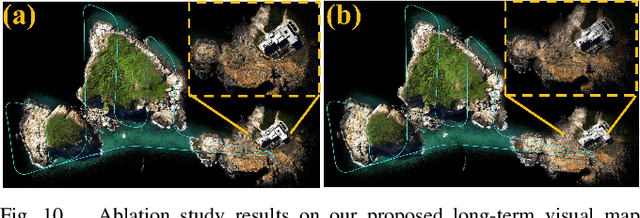
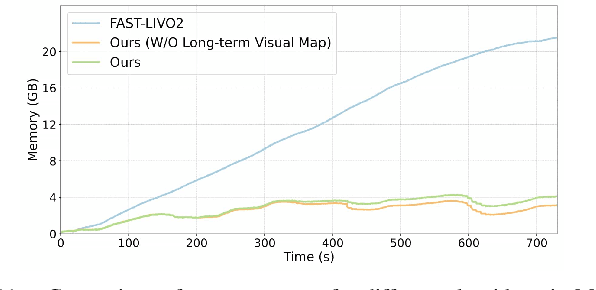
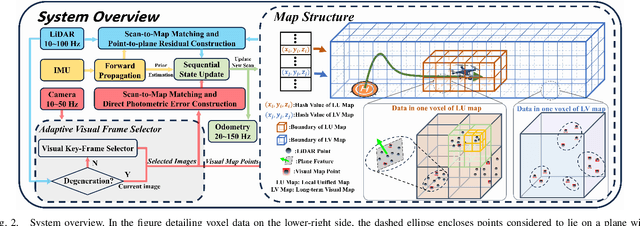
This paper presents a lightweight LiDAR-inertial-visual odometry system optimized for resource-constrained platforms. It integrates a degeneration-aware adaptive visual frame selector into error-state iterated Kalman filter (ESIKF) with sequential updates, improving computation efficiency significantly while maintaining a similar level of robustness. Additionally, a memory-efficient mapping structure combining a locally unified visual-LiDAR map and a long-term visual map achieves a good trade-off between performance and memory usage. Extensive experiments on x86 and ARM platforms demonstrate the system's robustness and efficiency. On the Hilti dataset, our system achieves a 33% reduction in per-frame runtime and 47% lower memory usage compared to FAST-LIVO2, with only a 3 cm increase in RMSE. Despite this slight accuracy trade-off, our system remains competitive, outperforming state-of-the-art (SOTA) LIO methods such as FAST-LIO2 and most existing LIVO systems. These results validate the system's capability for scalable deployment on resource-constrained edge computing platforms.
GS-LIVO: Real-Time LiDAR, Inertial, and Visual Multi-sensor Fused Odometry with Gaussian Mapping
Jan 15, 2025



In recent years, 3D Gaussian splatting (3D-GS) has emerged as a novel scene representation approach. However, existing vision-only 3D-GS methods often rely on hand-crafted heuristics for point-cloud densification and face challenges in handling occlusions and high GPU memory and computation consumption. LiDAR-Inertial-Visual (LIV) sensor configuration has demonstrated superior performance in localization and dense mapping by leveraging complementary sensing characteristics: rich texture information from cameras, precise geometric measurements from LiDAR, and high-frequency motion data from IMU. Inspired by this, we propose a novel real-time Gaussian-based simultaneous localization and mapping (SLAM) system. Our map system comprises a global Gaussian map and a sliding window of Gaussians, along with an IESKF-based odometry. The global Gaussian map consists of hash-indexed voxels organized in a recursive octree, effectively covering sparse spatial volumes while adapting to different levels of detail and scales. The Gaussian map is initialized through multi-sensor fusion and optimized with photometric gradients. Our system incrementally maintains a sliding window of Gaussians, significantly reducing GPU computation and memory consumption by only optimizing the map within the sliding window. Moreover, we implement a tightly coupled multi-sensor fusion odometry with an iterative error state Kalman filter (IESKF), leveraging real-time updating and rendering of the Gaussian map. Our system represents the first real-time Gaussian-based SLAM framework deployable on resource-constrained embedded systems, demonstrated on the NVIDIA Jetson Orin NX platform. The framework achieves real-time performance while maintaining robust multi-sensor fusion capabilities. All implementation algorithms, hardware designs, and CAD models will be publicly available.
Voxel-SLAM: A Complete, Accurate, and Versatile LiDAR-Inertial SLAM System
Oct 11, 2024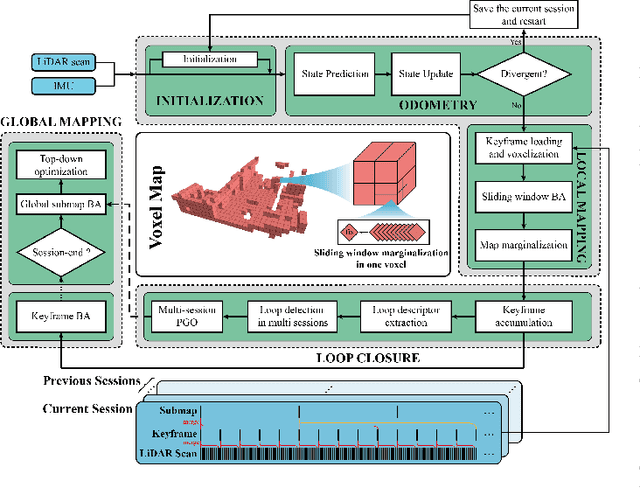
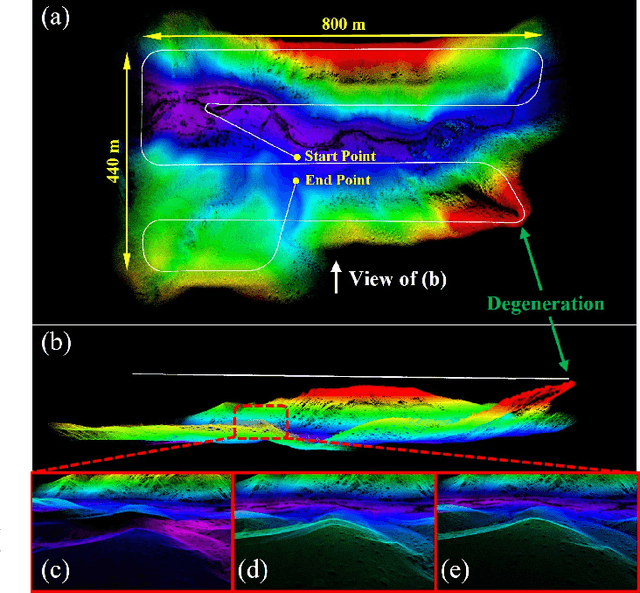
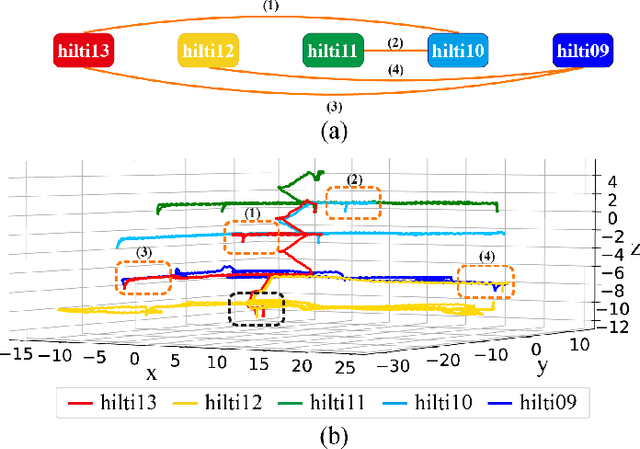
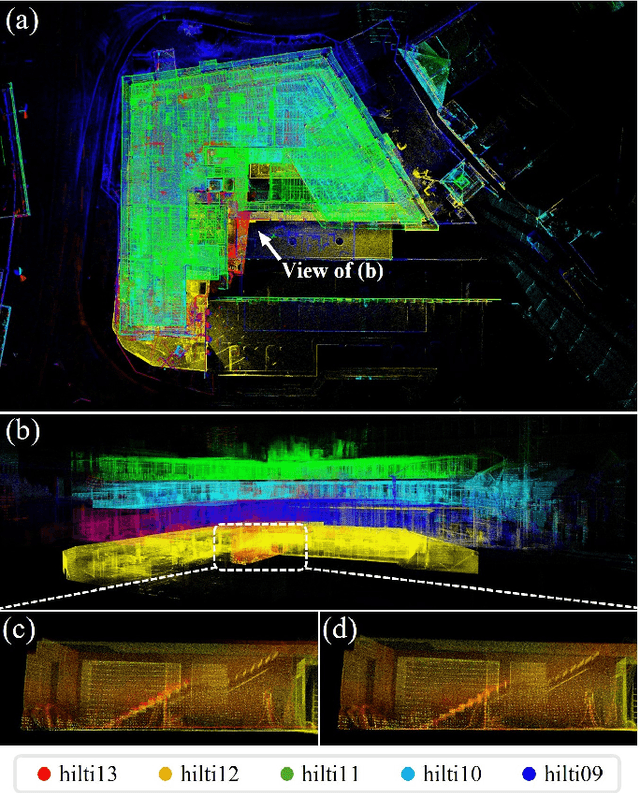
In this work, we present Voxel-SLAM: a complete, accurate, and versatile LiDAR-inertial SLAM system that fully utilizes short-term, mid-term, long-term, and multi-map data associations to achieve real-time estimation and high precision mapping. The system consists of five modules: initialization, odometry, local mapping, loop closure, and global mapping, all employing the same map representation, an adaptive voxel map. The initialization provides an accurate initial state estimation and a consistent local map for subsequent modules, enabling the system to start with a highly dynamic initial state. The odometry, exploiting the short-term data association, rapidly estimates current states and detects potential system divergence. The local mapping, exploiting the mid-term data association, employs a local LiDAR-inertial bundle adjustment (BA) to refine the states (and the local map) within a sliding window of recent LiDAR scans. The loop closure detects previously visited places in the current and all previous sessions. The global mapping refines the global map with an efficient hierarchical global BA. The loop closure and global mapping both exploit long-term and multi-map data associations. We conducted a comprehensive benchmark comparison with other state-of-the-art methods across 30 sequences from three representative scenes, including narrow indoor environments using hand-held equipment, large-scale wilderness environments with aerial robots, and urban environments on vehicle platforms. Other experiments demonstrate the robustness and efficiency of the initialization, the capacity to work in multiple sessions, and relocalization in degenerated environments.
Neural Surface Reconstruction and Rendering for LiDAR-Visual Systems
Sep 09, 2024



This paper presents a unified surface reconstruction and rendering framework for LiDAR-visual systems, integrating Neural Radiance Fields (NeRF) and Neural Distance Fields (NDF) to recover both appearance and structural information from posed images and point clouds. We address the structural visible gap between NeRF and NDF by utilizing a visible-aware occupancy map to classify space into the free, occupied, visible unknown, and background regions. This classification facilitates the recovery of a complete appearance and structure of the scene. We unify the training of the NDF and NeRF using a spatial-varying scale SDF-to-density transformation for levels of detail for both structure and appearance. The proposed method leverages the learned NDF for structure-aware NeRF training by an adaptive sphere tracing sampling strategy for accurate structure rendering. In return, NeRF further refines structural in recovering missing or fuzzy structures in the NDF. Extensive experiments demonstrate the superior quality and versatility of the proposed method across various scenarios. To benefit the community, the codes will be released at \url{https://github.com/hku-mars/M2Mapping}.
MFCalib: Single-shot and Automatic Extrinsic Calibration for LiDAR and Camera in Targetless Environments Based on Multi-Feature Edge
Sep 02, 2024
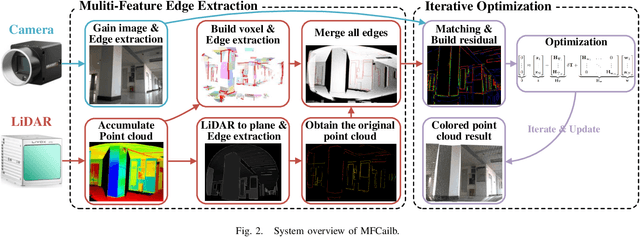
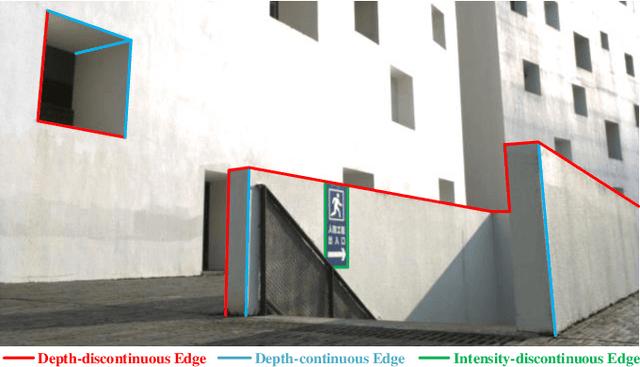
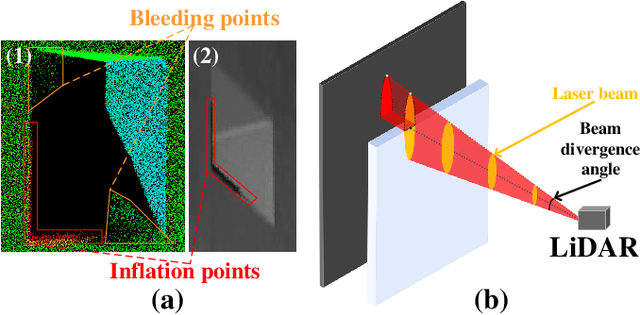
This paper presents MFCalib, an innovative extrinsic calibration technique for LiDAR and RGB camera that operates automatically in targetless environments with a single data capture. At the heart of this method is using a rich set of edge information, significantly enhancing calibration accuracy and robustness. Specifically, we extract both depth-continuous and depth-discontinuous edges, along with intensity-discontinuous edges on planes. This comprehensive edge extraction strategy ensures our ability to achieve accurate calibration with just one round of data collection, even in complex and varied settings. Addressing the uncertainty of depth-discontinuous edges, we delve into the physical measurement principles of LiDAR and develop a beam model, effectively mitigating the issue of edge inflation caused by the LiDAR beam. Extensive experiment results demonstrate that MFCalib outperforms the state-of-the-art targetless calibration methods across various scenes, achieving and often surpassing the precision of multi-scene calibrations in a single-shot collection. To support community development, we make our code available open-source on GitHub.
FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry
Aug 26, 2024

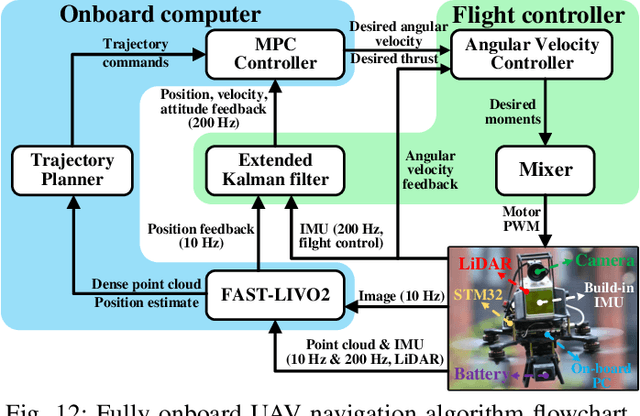

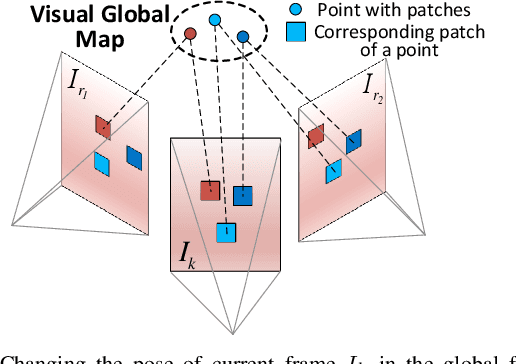
This paper proposes FAST-LIVO2: a fast, direct LiDAR-inertial-visual odometry framework to achieve accurate and robust state estimation in SLAM tasks and provide great potential in real-time, onboard robotic applications. FAST-LIVO2 fuses the IMU, LiDAR and image measurements efficiently through an ESIKF. To address the dimension mismatch between the heterogeneous LiDAR and image measurements, we use a sequential update strategy in the Kalman filter. To enhance the efficiency, we use direct methods for both the visual and LiDAR fusion, where the LiDAR module registers raw points without extracting edge or plane features and the visual module minimizes direct photometric errors without extracting ORB or FAST corner features. The fusion of both visual and LiDAR measurements is based on a single unified voxel map where the LiDAR module constructs the geometric structure for registering new LiDAR scans and the visual module attaches image patches to the LiDAR points. To enhance the accuracy of image alignment, we use plane priors from the LiDAR points in the voxel map (and even refine the plane prior) and update the reference patch dynamically after new images are aligned. Furthermore, to enhance the robustness of image alignment, FAST-LIVO2 employs an on-demanding raycast operation and estimates the image exposure time in real time. Lastly, we detail three applications of FAST-LIVO2: UAV onboard navigation demonstrating the system's computation efficiency for real-time onboard navigation, airborne mapping showcasing the system's mapping accuracy, and 3D model rendering (mesh-based and NeRF-based) underscoring the suitability of our reconstructed dense map for subsequent rendering tasks. We open source our code, dataset and application on GitHub to benefit the robotics community.
LIV-GaussMap: LiDAR-Inertial-Visual Fusion for Real-time 3D Radiance Field Map Rendering
Jan 26, 2024



We introduce an integrated precise LiDAR, Inertial, and Visual (LIV) multi-modal sensor fused mapping system that builds on the differentiable surface splatting to improve the mapping fidelity, quality, and structural accuracy. Notably, this is also a novel form of tightly coupled map for LiDAR-visual-inertial sensor fusion. This system leverages the complementary characteristics of LiDAR and visual data to capture the geometric structures of large-scale 3D scenes and restore their visual surface information with high fidelity. The initial poses for surface Gaussian scenes are obtained using a LiDAR-inertial system with size-adaptive voxels. Then, we optimized and refined the Gaussians by visual-derived photometric gradients to optimize the quality and density of LiDAR measurements. Our method is compatible with various types of LiDAR, including solid-state and mechanical LiDAR, supporting both repetitive and non-repetitive scanning modes. bolstering structure construction through LiDAR and facilitating real-time generation of photorealistic renderings across diverse LIV datasets. It showcases notable resilience and versatility in generating real-time photorealistic scenes potentially for digital twins and virtual reality while also holding potential applicability in real-time SLAM and robotics domains. We release our software and hardware and self-collected datasets on Github\footnote[3]{https://github.com/sheng00125/LIV-GaussMap} to benefit the community.
FAST-LIVO: Fast and Tightly-coupled Sparse-Direct LiDAR-Inertial-Visual Odometry
Mar 02, 2022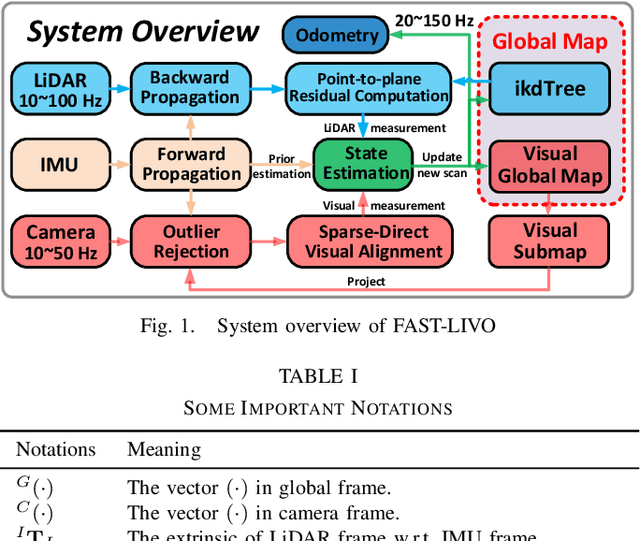
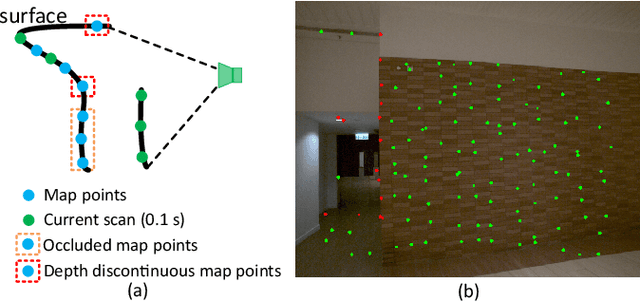
To achieve accurate and robust pose estimation in Simultaneous Localization and Mapping (SLAM) task, multi-sensor fusion is proven to be an effective solution and thus provides great potential in robotic applications. This paper proposes FAST-LIVO, a fast LiDAR-Inertial-Visual Odometry system, which builds on two tightly-coupled and direct odometry subsystems: a VIO subsystem and a LIO subsystem. The LIO subsystem registers raw points (instead of feature points on e.g., edges or planes) of a new scan to an incrementally-built point cloud map. The map points are additionally attached with image patches, which are then used in the VIO subsystem to align a new image by minimizing the direct photometric errors without extracting any visual features (e.g., ORB or FAST corner features). To further improve the VIO robustness and accuracy, a novel outlier rejection method is proposed to reject unstable map points that lie on edges or are occluded in the image view. Experiments on both open data sequences and our customized device data are conducted. The results show our proposed system outperforms other counterparts and can handle challenging environments at reduced computation cost. The system supports both multi-line spinning LiDARs and emerging solid-state LiDARs with completely different scanning patterns, and can run in real-time on both Intel and ARM processors. We open source our code and dataset of this work on Github to benefit the robotics community.