 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLV-Calib: LiDAR-Camera Extrinsic Calibration with Boundary-Response Modeling
Jun 12, 2026We present LV-Calib, a calibration framework for LiDAR-camera extrinsic estimation and LiDAR boundary-response calibration using a printable planar target. The target serves as a shared observation carrier: visual fiducials provide indexed image measurements, while circular reflectivity boundaries provide LiDAR-observable structural feature points. Instead of directly fitting boundary points as ideal geometric contours, LV-Calib automatically crops background points, estimates the target plane, and iteratively refines accurate LiDAR-side 3-D feature points from intensity and geometric constraints. The refinement explicitly handles the broadened and distorted transition band induced by finite beam footprint and mixed-intensity returns around black-white reflectivity discontinuities. Given these refined LiDAR features, we formulate a weighted reprojection-consistent extrinsic optimization with LiDAR feature alignment, where image observations are kept in the reprojection domain and LiDAR feature residuals are weighted by refinement confidence. Finally, using the estimated extrinsic and the extracted transition band, LV-Calib calibrates the LiDAR boundary response by estimating pitch-yaw-range residual statistics of boundary-overlap samples. Experiments on printed-board calibration data demonstrate sub-pixel reprojection accuracy, millimeter-level LiDAR feature consistency, and improved odometry performance. Code and calibration data will be released for reproducible evaluation.
GS-LIVO: Real-Time LiDAR, Inertial, and Visual Multi-sensor Fused Odometry with Gaussian Mapping
Jan 15, 2025



In recent years, 3D Gaussian splatting (3D-GS) has emerged as a novel scene representation approach. However, existing vision-only 3D-GS methods often rely on hand-crafted heuristics for point-cloud densification and face challenges in handling occlusions and high GPU memory and computation consumption. LiDAR-Inertial-Visual (LIV) sensor configuration has demonstrated superior performance in localization and dense mapping by leveraging complementary sensing characteristics: rich texture information from cameras, precise geometric measurements from LiDAR, and high-frequency motion data from IMU. Inspired by this, we propose a novel real-time Gaussian-based simultaneous localization and mapping (SLAM) system. Our map system comprises a global Gaussian map and a sliding window of Gaussians, along with an IESKF-based odometry. The global Gaussian map consists of hash-indexed voxels organized in a recursive octree, effectively covering sparse spatial volumes while adapting to different levels of detail and scales. The Gaussian map is initialized through multi-sensor fusion and optimized with photometric gradients. Our system incrementally maintains a sliding window of Gaussians, significantly reducing GPU computation and memory consumption by only optimizing the map within the sliding window. Moreover, we implement a tightly coupled multi-sensor fusion odometry with an iterative error state Kalman filter (IESKF), leveraging real-time updating and rendering of the Gaussian map. Our system represents the first real-time Gaussian-based SLAM framework deployable on resource-constrained embedded systems, demonstrated on the NVIDIA Jetson Orin NX platform. The framework achieves real-time performance while maintaining robust multi-sensor fusion capabilities. All implementation algorithms, hardware designs, and CAD models will be publicly available.
Target Localization and Performance Trade-Offs in Cooperative ISAC Systems: A Scheme Based on 5G NR OFDM Signals
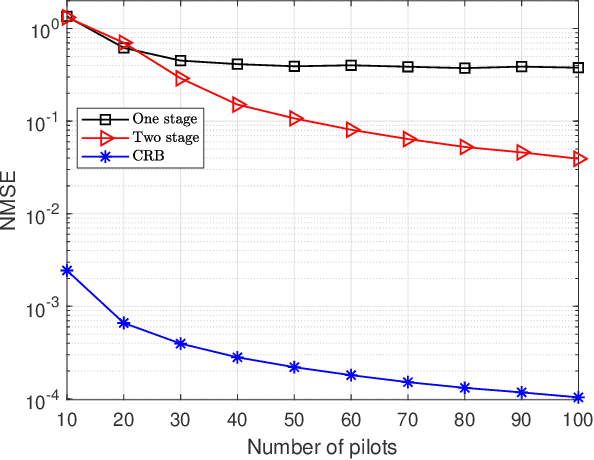
Mar 04, 2024The integration of sensing capabilities into communication systems, by sharing physical resources, has a significant potential for reducing spectrum, hardware, and energy costs while inspiring innovative applications. Cooperative networks, in particular, are expected to enhance sensing services by enlarging the coverage area and enriching sensing measurements, thus improving the service availability and accuracy. This paper proposes a cooperative integrated sensing and communication (ISAC) framework by leveraging information-carrying orthogonal frequency division multiplexing (OFDM) signals transmitted by access points (APs). Specifically, we propose a two-stage scheme for target localization, where communication signals are reused as sensing reference signals based on the system information shared at the central processing unit (CPU). In Stage I, we measure the ranges of scattered paths induced by targets, through the extraction of time-delay information from the received signals at APs. Then, the target locations are estimated in Stage II based on these range measurements. Considering that the scattered paths corresponding to some targets may not be detectable by all APs, we propose an effective algorithm to match the range measurements with the targets and achieve the target location estimation. Notably, by analyzing the OFDM numerologies defined in fifth generation (5G) standards, we elucidate the flexibility and consistency of performance trade-offs in both communication and sensing aspects. Finally, numerical results confirm the effectiveness of our sensing scheme and the cooperative gain of the ISAC framework.
LIV-GaussMap: LiDAR-Inertial-Visual Fusion for Real-time 3D Radiance Field Map Rendering
Jan 26, 2024



We introduce an integrated precise LiDAR, Inertial, and Visual (LIV) multi-modal sensor fused mapping system that builds on the differentiable surface splatting to improve the mapping fidelity, quality, and structural accuracy. Notably, this is also a novel form of tightly coupled map for LiDAR-visual-inertial sensor fusion. This system leverages the complementary characteristics of LiDAR and visual data to capture the geometric structures of large-scale 3D scenes and restore their visual surface information with high fidelity. The initial poses for surface Gaussian scenes are obtained using a LiDAR-inertial system with size-adaptive voxels. Then, we optimized and refined the Gaussians by visual-derived photometric gradients to optimize the quality and density of LiDAR measurements. Our method is compatible with various types of LiDAR, including solid-state and mechanical LiDAR, supporting both repetitive and non-repetitive scanning modes. bolstering structure construction through LiDAR and facilitating real-time generation of photorealistic renderings across diverse LIV datasets. It showcases notable resilience and versatility in generating real-time photorealistic scenes potentially for digital twins and virtual reality while also holding potential applicability in real-time SLAM and robotics domains. We release our software and hardware and self-collected datasets on Github\footnote[3]{https://github.com/sheng00125/LIV-GaussMap} to benefit the community.
RIS-Position and Orientation Estimation in Dispersive mmWave MIMO Scenarios
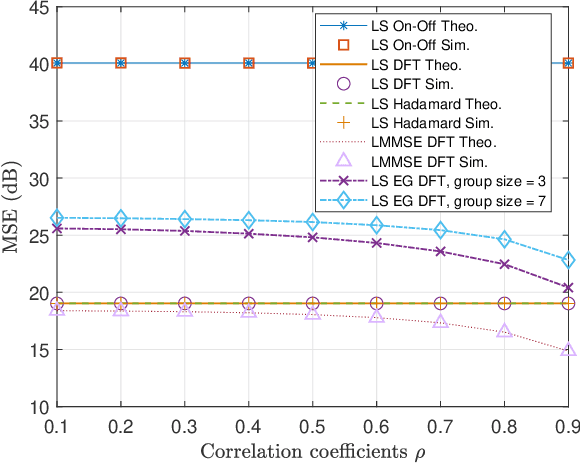
Feb 10, 2023In this paper, we investigate the problem of estimating the position and the angle of rotation of a mobile station (MS) in a millimeter wave (mmWave) multiple-input-multiple-output (MIMO) system aided by a reconfigurable intelligent surface (RIS). The virtual line-of-sight (VLoS) link created by the RIS and the non-line-of-sight (NLoS) links that originate from scatterers in the considered environment are utilized to facilitate the estimation. A two-step positioning scheme is exploited, where the channel parameters are first acquired, and the position-related parameters are then estimated. The channel parameters are obtained through a coarser and a subsequent finer estimation processes. As for the coarse estimation, the distributed compressed sensing orthogonal simultaneous matching pursuit (DCS-SOMP) algorithm, the maximum likelihood (ML) algorithm, and the discrete Fourier transform (DFT) are utilized to separately estimate the channel parameters. The obtained channel parameters are then jointly refined by using the space-alternating generalized expectation maximization (SAGE) algorithm, which circumvents the high-dimensional optimization issue of ML estimation. Departing from the estimated channel parameters, the positioning-related parameters are estimated. The performance of estimating the channel-related and position-related parameters is theoretically quantified by using the Cramer-Rao lower bound (CRLB). Simulation results demonstrate the superior performance of the proposed positioning algorithms.
Two-Step mmWave Positioning Scheme with RIS-Part II: Position Estimation and Error Analysis
Aug 16, 2022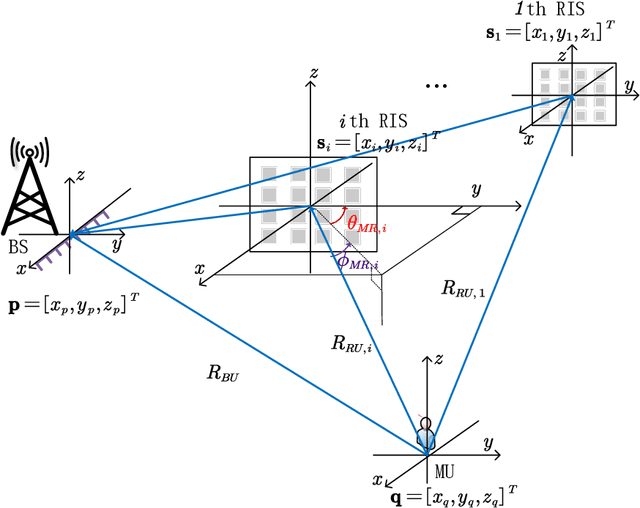
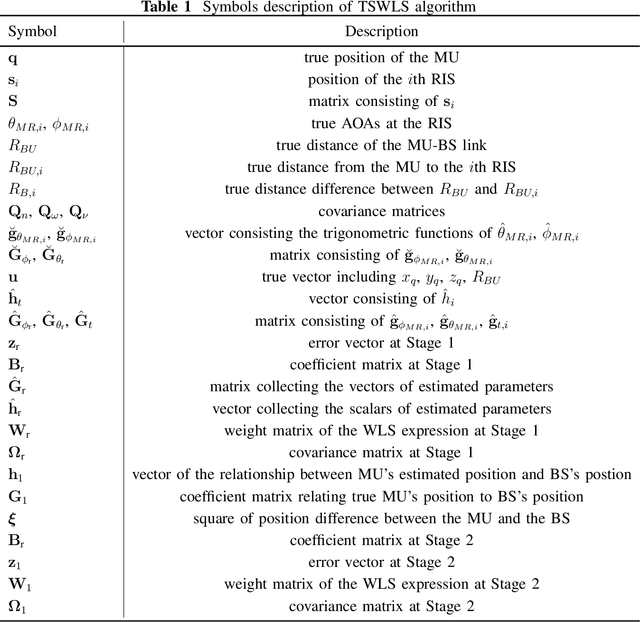

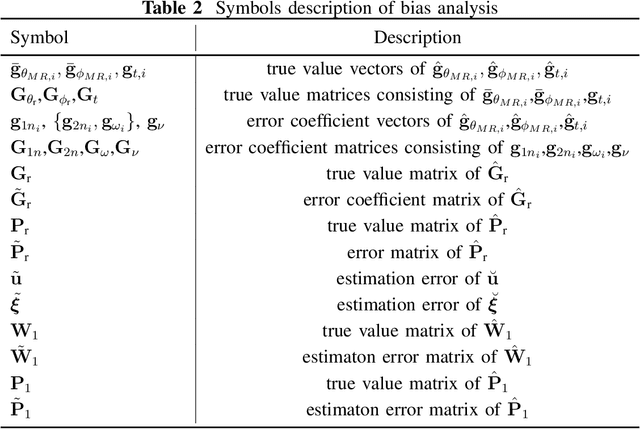
In this series of work, we propose a comprehensive two-step three-dimensional (3D) positioning scheme in a millimeter wave (mmWave) system, where the reconfigurable intelligent surface (RIS) is leveraged to enhance the positioning performance of mobile users (MUs). Specifically, the first step is the estimation error modeling and analysis, while the second step is the corresponding positioning algorithm design and bias analysis. The first step is introduced in Part I of this series of work, and the second step is investigated in this paper. Our aim in this series of work is to obtain the closed-form solution of the MU's position through a two-stage weight least square (TSWLS) algorithm. In the first stage, we construct the pseudolinear equations based on the angle of arrival (AOA) and the time difference of arrival (TDOA) estimation at the RISs, then we obtain a preliminary estimation by solving these equations using the weight least square (WLS) method. Based on the preliminary estimation in the first stage, a new set of pseudolinear equations are obtained, and a finer estimation is obtained by solving the equations using the WLS method in the second stage. By combining the estimation of both stages, the final estimation of the MU's position is obtained. Further, we study the theoretical bias of the proposed algorithm by considering the estimation error in both stages. Simulation results demonstrate the superiority of the proposed positioning scheme.
Two-Step mmWave Positioning Scheme with RIS-Part I: Angle Estimation and Analysis
Aug 16, 2022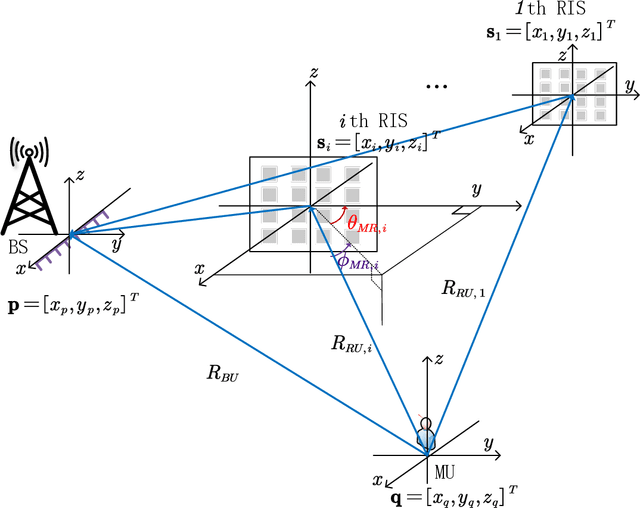
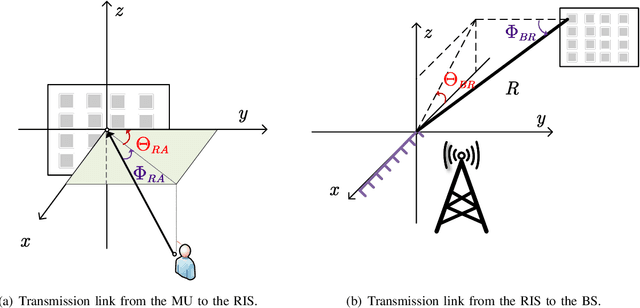
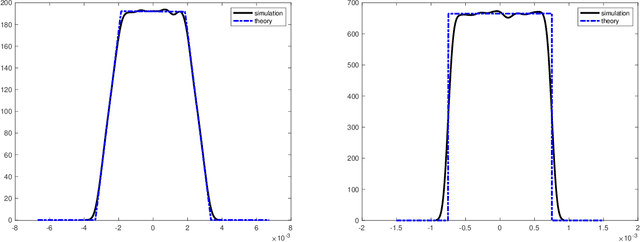
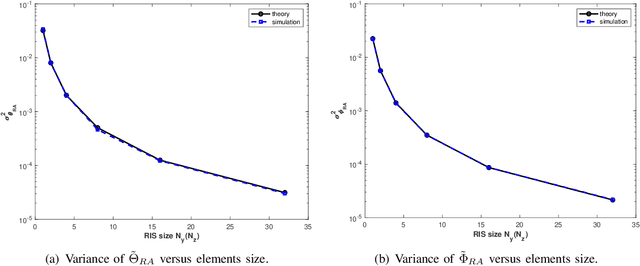
In this series of work, we propose a comprehensive two-step three-dimensional (3D) positioning scheme in a millimeter wave (mmWave) system, where the reconfigurable intelligent surface (RIS) is leveraged to enhance the positioning performance of mobile users (MUs). Specifically, the first step is the estimation error modeling and analysis based on the two-dimensional discrete Fourier transform (2D-DFT) angle estimation technique, while the second step is the corresponding positioning algorithm design and bias analysis. The first step is introduced in this paper, and the second step is investigated in Part II of this series work. Based on 2D-DFT angle estimation, the angle estimation error is modeled and analyzed by deriving its probability density functions (PDF). More specifically, we first derive the PDF by using the geometric relationship between the angles of arrival (AOAs) and their triangle functions. Then, we simplify the intricate expression of the PDF of the AOA estimation error by employing the first-order linear approximation of triangle functions. Finally, we derive a complex expression for the variance based on the derived PDF. Distinctively, for the azimuth estimation error, the variance is separately integrated according to the different non-zero intervals of the PDF, which will be used in the second part of this series work for the analysis of the position estimation error. Extensive simulation results are also presented to verify the accuracy of the derived results.
An Overview of Signal Processing Techniques for RIS/IRS-aided Wireless Systems
Dec 15, 2021
In the past as well as present wireless communication systems, the wireless propagation environment is regarded as an uncontrollable black box that impairs the received signal quality, and its negative impacts are compensated for by relying on the design of various sophisticated transmission/reception schemes. However, the improvements through applying such schemes operating at two endpoints (i.e., transmitter and receiver) only are limited even after five generations of wireless systems. Reconfigurable intelligent surface (RIS) or intelligent reflecting surface (IRS) have emerged as a new and revolutionary technology that can configure the wireless environment in a favorable manner by properly tuning the phase shifts of a large number of quasi passive and low-cost reflecting elements, thus standing out as a promising candidate technology for the next-/sixth-generation (6G) wireless system. However, to reap the performance benefits promised by RIS/IRS, efficient signal processing techniques are crucial, for a variety of purposes such as channel estimation, transmission design, radio localization, and so on. In this paper, we provide a comprehensive overview of recent advances on RIS/IRS-aided wireless systems from the signal processing perspective. We also highlight promising research directions that are worthy of investigation in the future.
Optimization of RIS Configurations for Multiple-RIS-Aided mmWave Positioning Systems based on CRLB Analysis
Nov 28, 2021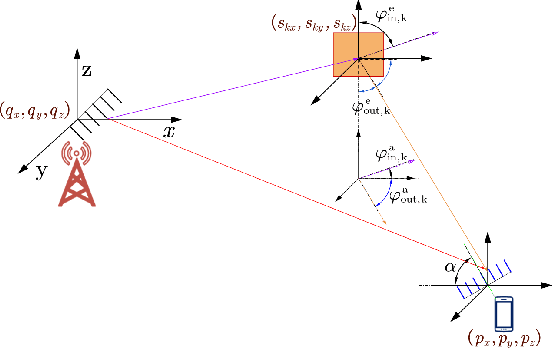
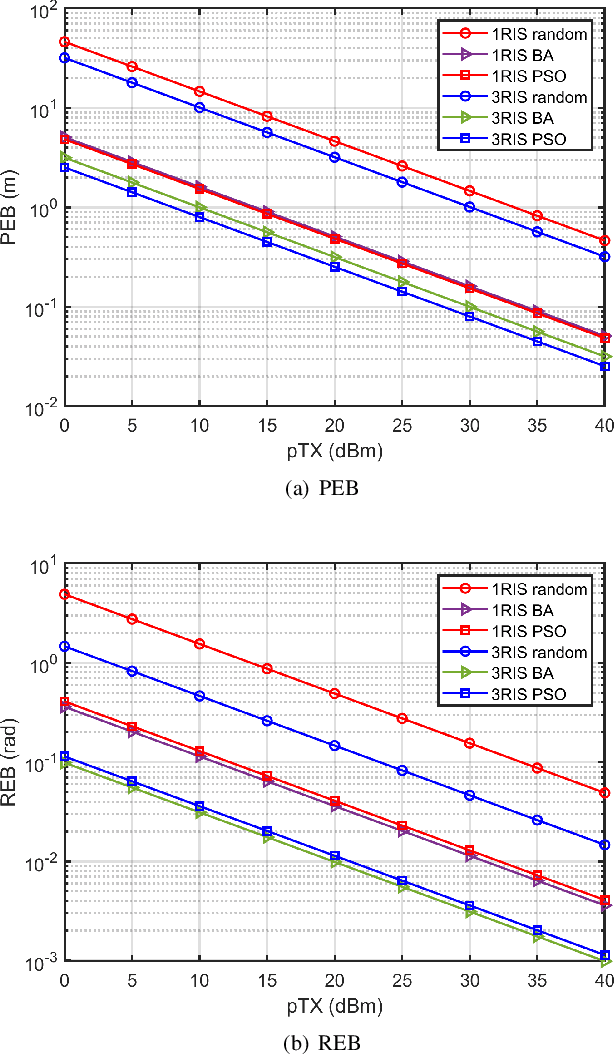
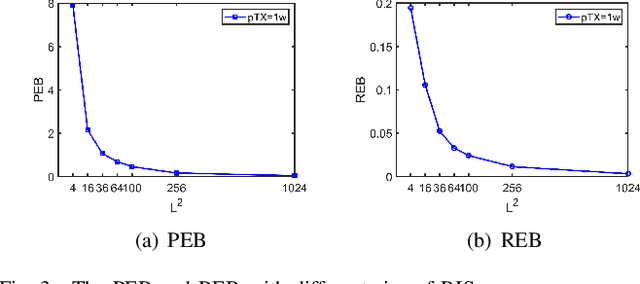
Reconfigurable intelligent surface (RIS) is a promising technology for future millimeter-wave (mmWave) communication systems. However, its potential benefits of adopting RIS for high-precision positioning in mmWave systems are still less understood. In this paper, we study a multiple-RIS-aided mmWave positioning system and derive the Cram$\rm{\acute{e}}$r-Rao error bound. Based on the derived bound, we optimize the phase shift of the RISs by the particle swarm optimization (PSO) algorithm. Numerical results have demonstrated the advantages of using multiple RISs in enhancing the positioning accuracy in mmWave systems.