 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensing Capacity for Integrated Sensing and Communication Systems in Low-Altitude Economy
Nov 11, 2024


The burgeoning significance of the low-altitude economy (LAE) has garnered considerable interest, largely fuelled by the widespread deployment of unmanned aerial vehicles (UAVs). To tackle the challenges associated with the detection of unauthorized UAVs and the efficient scheduling of authorized UAVs, this letter introduces a novel performance metric, termed sensing capacity, for integrated sensing and communication (ISAC) systems. This metric, which quantifies the capability of a base station (BS) to detect multiple UAVs simultaneously, leverages signal-to-noise ratio (SNR) and probability of detection (PD) as key intermediate variables. Through mathematical derivations, we can derive a closed-form solution for the maximum number of UAVs that can be detected by the BS while adhering to a specific SNR constraint. Furthermore, an approximate solution based on PD constraints is proposed to facilitate the efficient determination of the threshold for the maximum number of detectable UAVs. The accuracy of this analytical approach is verified through extensive simulation results.
Target Localization and Performance Trade-Offs in Cooperative ISAC Systems: A Scheme Based on 5G NR OFDM Signals
Mar 04, 2024The integration of sensing capabilities into communication systems, by sharing physical resources, has a significant potential for reducing spectrum, hardware, and energy costs while inspiring innovative applications. Cooperative networks, in particular, are expected to enhance sensing services by enlarging the coverage area and enriching sensing measurements, thus improving the service availability and accuracy. This paper proposes a cooperative integrated sensing and communication (ISAC) framework by leveraging information-carrying orthogonal frequency division multiplexing (OFDM) signals transmitted by access points (APs). Specifically, we propose a two-stage scheme for target localization, where communication signals are reused as sensing reference signals based on the system information shared at the central processing unit (CPU). In Stage I, we measure the ranges of scattered paths induced by targets, through the extraction of time-delay information from the received signals at APs. Then, the target locations are estimated in Stage II based on these range measurements. Considering that the scattered paths corresponding to some targets may not be detectable by all APs, we propose an effective algorithm to match the range measurements with the targets and achieve the target location estimation. Notably, by analyzing the OFDM numerologies defined in fifth generation (5G) standards, we elucidate the flexibility and consistency of performance trade-offs in both communication and sensing aspects. Finally, numerical results confirm the effectiveness of our sensing scheme and the cooperative gain of the ISAC framework.
Reconfigurable Intelligent Surface assisted Integrated Sensing, Communication and Computation Systems
Feb 21, 2024



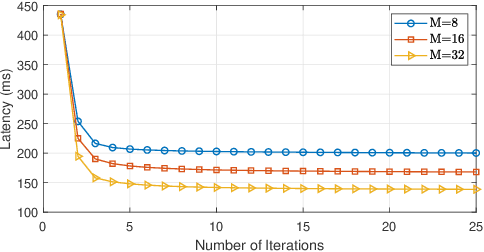
This paper investigates a reconfigurable intelligent surface (RIS)-assisted integrated sensing, communication, and computation (ISCC) system. In this paradigm, the integrated sensing and communication (ISAC)-enabled user equipments (UEs) simultaneously detect the target and offload the computational tasks of radar sensing to the edge computing server (ECS) through their communication functionality. To enhance the efficiency of computation offloading, we deploy an RIS to mitigate the high attenuation between UEs and the ECS. A latency minimization problem is investigated with constraints on UE's transmit power, radar signal-to-interference-plus-noise ratio (SINR), RIS phase shift, and computation capability. We propose an algorithm based on the block coordinate descent (BCD) method to decouple the original problem into two subproblems, and then the computational and beamforming variables are optimized alternately utilizing efficient iterative algorithms. Simulation results demonstrate the effectiveness of our proposed algorithm.
Energy Minimization for Active RIS-Aided UAV-Enabled SWIPT Systems
Jun 17, 2023In this paper, we consider an active reconfigurable intelligent surface (RIS)-aided unmanned aerial vehicle(UAV)-enabled simultaneous wireless information and power transfer(SWIPT) system with multiple ground users. Compared with the conventional passive RIS, the active RIS deploying the internally integrated amplifiers can offset part of the multiplicative fading. In this system, we deal with an optimization problem of minimizing the total energy cost of the UAV. Specifically, we alternately optimize the trajectories, the hovering time, and the reflection vectors at the active RIS by using the successive convex approximation (SCA) method. Simulation results show that the active RIS performs better in energy saving than the conventional passive RIS.
Active Reconfigurable Intelligent Surface for Mobile Edge Computing
Sep 07, 2022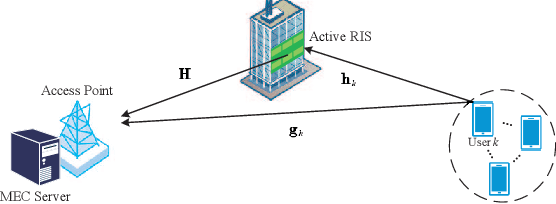
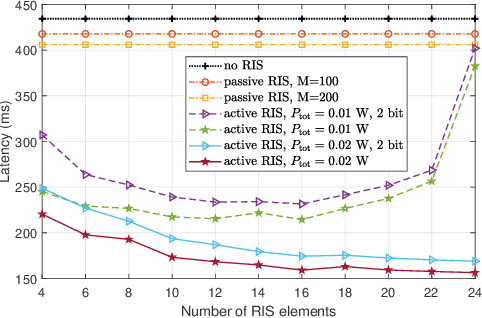

This paper investigates an active reconfigurable intelligent surface (RIS)-aided mobile edge computing (MEC) system. Compared with passive RIS, the active RIS is equipped with active reflective amplifier, which can effectively circumvent the "double path loss" attenuation. We propose a joint computing and communication design to minimize the maximum computational latency (MCL), subject to both the phase shift constraints and the edge computing capability constraints. Specifically, the original problem is decoupled into four subproblems, and then the block coordinate descent (BCD) method and the successive convex approximation (SCA) method are applied to alternately optimize the subproblems. The simulation results show that with the same power budget, the performance gain achieved by the active RIS is much larger than that by the passive RIS.
Energy Minimization in RIS-Assisted UAV-Enabled Wireless Power Transfer Systems
Aug 18, 2022
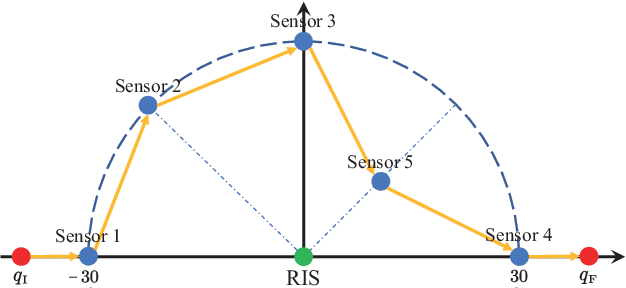


Unmanned aerial vehicle (UAV)-enabled wireless power transfer (WPT) systems offer significant advantages in coverage and deployment flexibility, but suffer from endurance limitations due to the limited onboard energy. This paper proposes to improve the energy efficiency of UAV-enabled WPT systems with multiple ground sensors by utilizing reconfigurable intelligent surface (RIS). Specifically, the total energy consumption of the UAV is minimized, while meeting the energy requirement of each sensor. Firstly, we consider a fly-hover-broadcast (FHB) protocol, in which the UAV radiates radio frequency (RF) signals only at several hovering locations. The energy minimization problem is formulated to jointly optimize the UAV's trajectory, hovering time and the RIS's reflection coefficients. To solve this complex non-convex problem, we propose an efficient algorithm. Specifically, the successive convex approximation (SCA) framework is adopted to jointly optimize the UAV's trajectory and hovering time, in which a minorization-maximization (MM) algorithm that maximizes the minimum charged energy of all sensors is provided to update the reflection coefficients. Then, we investigate the general scenario in which the RF signals are radiated during the flight, aiming to minimize the total energy consumption of the UAV by jointly optimizing the UAV's trajectory, flight time and the RIS's reflection coefficients. By applying the path discretization (PD) protocol, the optimization problem is formulated with a finite number of variables. A high-quality solution for this more challenging problem is obtained. Finally, our simulation results demonstrate the effectiveness of the proposed algorithm and the benefits of RIS in energy saving.